Phẫu thuật đồ chơi Wall-E biến nó thành robot điều khiển từ xa diễn ra như thế nào?
Quá trình từ đồ chơi Wall-E trở thành robot telepresence điều khiển bởi Raspberry Pi.
Robot Wall-E ban đầu. Đây là món quà mà tác giả của robot này được vợ của mình tặng vào dịp giáng sinh. Và anh ta đã quyết định biến nó thành một robot telepresence để có thể có thể đặt nó tại văn phòng và giao tiếp từ xa.
Sản phẩm ban đầu:

Bộ truyền động cũ của Wall-E chỉ có thể khiến nó di chuyển tiến lùi và lùi-rẽ. Anh ta đã thay thế một bộ truyền động in 3D mới và lắp thêm motor để nó có thể di chuyển đa hướng hơn.
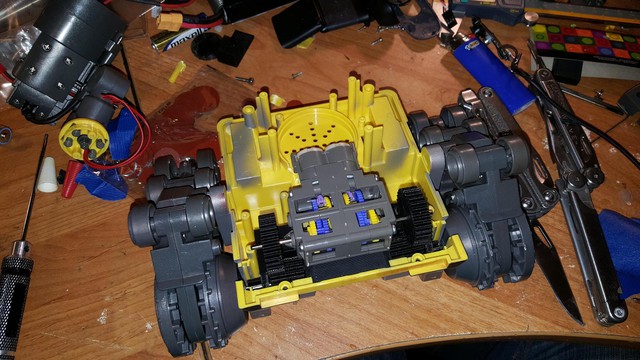
Một củ loa với âm li theo kèm được lắp thêm vào.

Bộ não
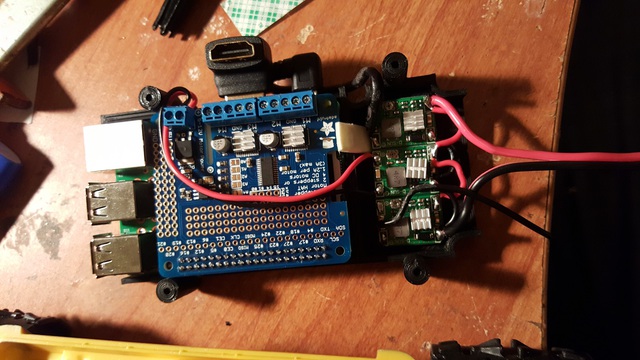
Wall-E được điều khiển bằng Raspberry Pi với "MotorHat" từ Adafruit để điều khiển bộ truyền động. Ba bảng mạch màu xanh phía bên phải là bộ chuyển đổi DC/DC để hạ điện thế của pin xuống phù hợp với Pi, motor, và củ loa.

Bảng mạch được đặt vào một khay in 3D. Một khay khác sẽ được đặt lên trên để đặt pin và âm li.

Phần camera sẽ phải sử dụng một camera với microphone có sẵn bởi Pi không có mic input, vì thế lựa chọn bị hạn chế đi rất nhiều. Anh ta đã sử dụng Logitech C270, nó khá lớn nên anh đã phải đặt theo chiều dọc con mắt, và phải đặt thêm một gương nghiêng để hắt sáng.

Phần chỉnh góc của gương hắt sáng cũng là một công đoạn khá khó khăn.

Camera đã hoạt động.

Một khung in 3D sẽ dùng để gắn màn hình LCD HDMI 5".

Lắp đặt màn hình. BẠN CÓ THẤY WALL-E ĐANG CẦM MÀN HÌNH VỚI ĐÔI BÀN TAY NHỎ XINH KHÔNG!

Còn gì đáng yêu hơn.

Phần năng lượng, Wall-E được lắp một pin LiPo từ máy bay RC; có thể dùng bất cứ pin nào sử dụng điện áp giữa 5V và 28V. Wall-E đứng yên sẽ cần khoảng 300mA cho Pi, màn hình, và phần kết nối. Khi di chuyển, nó sẽ tốn khoảng 3A. Với phần pin này, nó có thể đứng yên khoảng 4 giờ, và khoảng 30 phút nếu di chuyển liên tục. Anh ta cũng đã lắp một bộ phận báo hết pin để đồng nghiệp có thể sạc pin hoặc ngắt kết nối khi cần.

Wall-E sử dụng avahi để điều khiển trang đơn giản này tại "walle.local". Sơ đồ điều khiển cơ bản sẽ là:
- Video sẽ được gửi và nhận trên trình duyệt với những trang lấy từ server Apache của Wall-E.
- Âm thanh được gửi đi bằng Mumble trên một server Murmur chuyên biệt được host trên Pi.
-Điều khiển di chuyển sẽ sử dụng SSH terminal và một script python. Điều khiển Wall-E bằng phím w-a-s-d chẳng khác gì chơi game FPS cả.

Đây là trang hiển thị video lấy từ server Apache chạy trên Wall-E.
Với video từ Wall-E tới nơi điều khiển: Trang video sẽ hiện thị một live stream từ mjpg-streamer trên Pi (ảnh lớn bên trái).
Với video từ nơi điều khiển tới Wall-e: Trang video sẽ sử dụng HTML5 để chụp lại khung hình từ camera của PC sau đó upload chúng lên Wall-E (ảnh nhỏ). Wall-E sẽ hiển thị một trang nội bộ bằng Chromium lên màn hình của nó, liên tục update và hiển thị khung hình được upload.

Và đây là thành quả:

Video thực tế của robot telepresence Wall-E:

Cùng xem Wall-E tác nghiệp như thế nào.
Tổng hợp.
NỔI BẬT TRANG CHỦ

Chuyên gia MIT chia sẻ bí kíp tạo prompt để tận dụng sức mạnh của chatbot AI
Chatbot AI ngày nay là những phần mềm có thể được "lập trình" bằng ngôn ngữ tự nhiên.

Vì sao cửa sổ trên máy bay lại có hình oval chứ ko phải hình vuông?
