Robot này chứng minh nền khoa học của Liên Xô một thời đã vượt trước người Mỹ, thế nhưng vì nhiều nguyên nhân mà chương trình vũ trụ của Liên Xô bị trì trệ dẫn tới tụt hậu về sau này.
Có một sự kiện lịch sử mà rất ít người nhớ, đó là vào tháng Mười Hai năm 1971, Liên Xô đã đưa thành công robot tự hành xuống bề mặt hành tinh Đỏ trước khi người Mỹ đưa được những cỗ máy thám hiểm sao Hỏa của họ lên như Curiosity, Opportunity, Spirit, và cả Sojourner.

Thiết bị này được các nhà khoa học Xô Viết đặt cho một cái tên rất dài: Thiết bị đánh giá khả năng vượt địa hình – sao Hỏa (nguyên văn tiếng Nga là Прибор Оценки Проходимости – Марс), viết tắt các chữ cái đầu thành PrOP-M (ПрОП-М).
PrOP-M chỉ là một đơn vị nhỏ của cỗ máy tự động lớn hơn là trạm thăm dò liên hành tinh Mars 2 và Mars 3, có khả năng thả lên bề mặt hành tinh Đỏ các robot nghiên cứu tí hon.
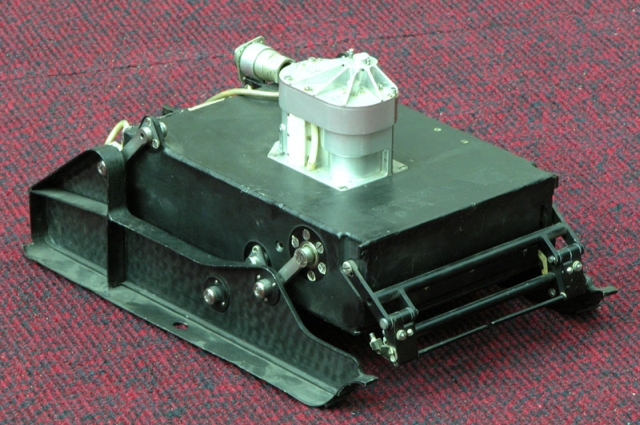
Robot PrOP-M chỉ nặng 4,5 kg và có kích thước 215x160x60 mm. Nó được trang bị máy đo xuyên động và thiết bị đo độ đậm đặc của vật chất bằng tia gamma, nhờ đó các nhà khoa học mong chờ rằng robot sẽ đo được mật độ của đất và các đặc điểm khác của bề mặt của sao Hỏa. PrOP-M không có nguồn điện riêng mà hoạt động dựa vào trạm chính Mars-3 qua dây cáp dài 15 mét. Sợi cáp này vừa đảm bảo việc cấp điện cho robot, vừa dùng để truyền tải dữ liệu khoa học do robot thu thập được về trạm.
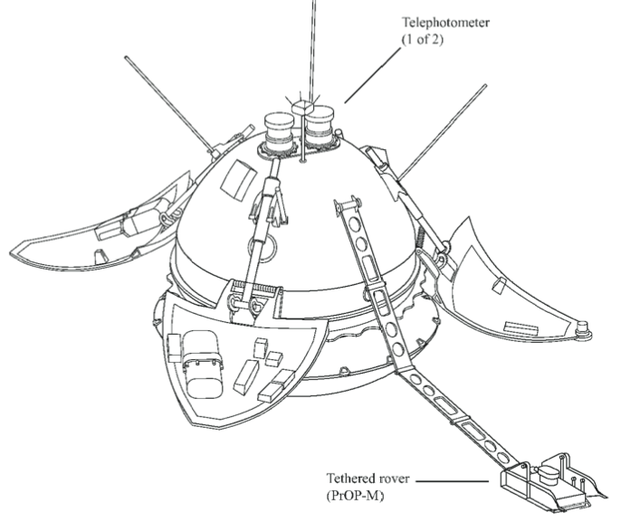
Theo kế hoạch, sau khi hạ cánh lên sao Hỏa một thời gian, từ Trái đất sẽ gửi lệnh lên điều khiển các cánh tay máy trên trạm để thả robot PrOP-M xuống bề mặt và đặt trong tầm quan sát của camera.

Cách di chuyển đặc biệt của PrOP-M
Robot sẽ di chuyển trên mặt đất của sao Hỏa bằng hai ván trượt kim loại nằm ở hai bên thân. PrOP-M được trang bị các cảm biến tiếp xúc dạng đầu dò để phát hiện va chạm với chướng ngại vật trên đường đi.

Mặc dù có thiết kế rất đơn giản nhưng PrOP-M là một robot hoàn chỉnh có thể hoạt động độc lập. Khi phát hiện va chạm với vật cản, nó sẽ tự động ngừng di chuyển, lùi lại và thay đổi hướng để vượt qua chướng ngại vật. Sau mỗi 1,5 mét thực hiện kiểm soát phương hướng và thực hiện các phép đo đạc khoa học. Ý tưởng đằng sau thiết kế của PrOP-M, là nó phải di chuyển trong tầm quan sát của camera Mars-3 và sẽ đo đạc chừng nào trạm chính còn đủ năng lượng.

Nhưng không may, rất đáng tiếc cho đội Liên Xô là robot tự hành đầu tiên của họ không được số phận ưu ái cho "bước đi" trên bề mặt sao Hỏa. Tháng 11 năm 1971, trạm nghiên cứu Mars-2 sau khi tách ra khỏi tàu vũ trụ đã rơi quá đột ngột vào bầu khí quyển của sao Hỏa. Hệ thống phanh hoạt động kém hiệu quả khiến Mars-2 bị rơi. Tuy nhiên nó đã trở thành vật thể nhân tạo đầu tiên xuất hiện trên bề mặt của hành tinh Đỏ.
Kế hoạch chinh phục sao Hỏa của Liên Xô những năm 70 của thế kỷ trước
Vào tháng 12 năm 1971, trạm Mars-3 may mắn hơn một chút, đã thực hiện hạ cánh an toàn. Nhưng liên lạc từ Trái đất đến Mars-3 bị gián đoạn sau khi kết nối, ngay trước thời điểm robot PrOP-M sẽ được hạ xuống bề mặt của sao Hỏa chỉ 20 giây.
Sự cố của trạm Mars-3 cho tới ngày nay vẫn chưa được làm sáng tỏ. Có ý kiến cho rằng trạm đã bị hư hại do bão cát mạnh, các thiết bị do điện tích quầng vầng quang phá hỏng. Một giả thuyết khác ngộ nghĩnh hơn là Mars-3 rơi xuống đầu người sao Hỏa như tuyết mùa đông nên khiến họ tức giận và đập phá.
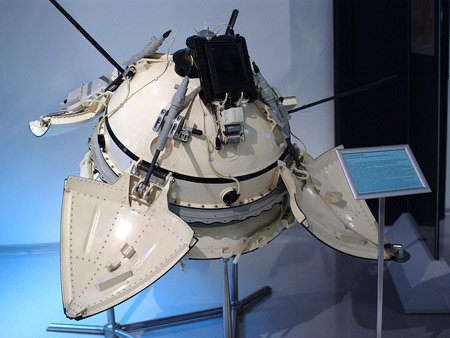
Module nghiên cứu và robot tự hành PrOP-M trong viện bảo tàng của Nga ngày nay
Tổng hợp
NỔI BẬT TRANG CHỦ

Chuyên gia MIT chia sẻ bí kíp tạo prompt để tận dụng sức mạnh của chatbot AI
Chatbot AI ngày nay là những phần mềm có thể được "lập trình" bằng ngôn ngữ tự nhiên.

Ra mắt smartphone chip Snapdragon 8s Gen 3, RAM tới 16GB, màn hình 144Hz, pin 6.000mAh, giá 7 triệu đồng
