
Một trong những phân cảnh nổi tiếng nhất của Terminator 2: Judgment Day, đó là khi T-800 tự lột da trên tay mình, tiết lộ bản chất nó là một người máy.
Bàn tay với các khớp kim loại không mất thời gian để thuyết phục tiến sĩ Miles Dyson tin vào Ngày phát xét. Trong tương lai đó, ông chính là cha đẻ của Skynet, trí tuệ nhân tạo sau này sẽ gián tiếp gây ra cái chết cho 3 tỷ người trên Trái Đất.
Nhận ra mức độ nghiêm trọng từ công trình nghiên cứu mà mình đang thực hiện, tiến sĩ Dyson đã dẫn đường cho T-800, Sarah và John Connor đi tới phòng thí nghiệm. Ở đó, họ đã phá hủy hai nguyên mẫu: Một con chip bị gãy và chính bàn tay máy của T-800 bị cắt lìa trong phần phim thứ nhất Terminator (1984). Cả hai đều là thứ mà Dyson dựa vào để phát triển Skynet.


Ngoài đời thực, phòng thí nghiệm của tiến sĩ Dyson có thể là một tòa nhà 3 tầng, màu ghi sáng nằm ở số 3180, Đại lộ 18, thành phố San Francisco. Pioneer Building được xây theo phong cách cổ điển đầu những năm 1900, nhưng nội thất của nó thì đã được cải tạo lại để phù hợp với thế giới hơn 100 năm sau đó.
Từ năm 2016, tòa nhà này đã trở thành trụ sở của OpenAI – phòng thí nghiệm nghiên cứu trí tuệ nhân tạo ban đầu được thành lập bởi Elon Musk, Peter Thiel và một số tên tuổi lớn khác ở Thung lũng Silicon.
Vài tháng trở lại đây, OpenAI được nhắc đến liên tục nhờ sự nổi lên của ChatGPT, mô hình ngôn ngữ thông minh mà họ đang phát triển. Hai năm trước đó, một số người có thể đã biết tên phòng thí nghiệm này khi họ cho ra mắt mô hình học sâu DALL-E có thể vẽ tranh theo mệnh lệnh.
Nhưng đừng quên rằng OpenAI còn có một sản phẩm khác được họ phát triển từ năm 2018, Dactyl, bàn tay robot với những ngón tay có thể co duỗi như người thật. Trong một căn phòng nào đó ở số 3180, Đại lộ 18, Dactyl với thuật toán học máy của nó đã giải thành công những khối rubik 6 mặt chỉ trong vòng 4 phút.


Mặc dù thành tích của Dactyl còn cách xa kỷ lục của con người với bàn tay sinh học (Max Park, một thanh niên 21 tuổi người Mỹ có thể giải rubik 3x3x3 chỉ bằng một tay trong vòng 6,2 giây), nhưng những cú xoay rubik bằng một tay chứng minh nó đã đạt tới độ khéo léo mà chưa một bàn tay robot nào thực hiện được trong suốt 500 năm qua, kể từ khi Leonardo da Vinci phác thảo ra mẫu tay máy đầu tiên năm 1495.
Tái tạo lại chuyển động của bàn tay con người sang cho robot, hóa ra, chưa bao giờ là một nhiệm vụ đơn giản. Và các kỹ sư giỏi nhất trong thế kỷ 21 cũng biết rằng, họ đang phải chạy đua với thời gian để bắt kịp hai triệu năm tiến hóa, thứ đã giúp bàn tay con người trở thành cấu trúc cơ sinh học phức tạp nhất từng tồn tại trên Trái Đất.
Nếu bạn cần phải tìm ra một bộ phận trên cơ thể có chuyển động phức tạp nhất, thì đó chính là bàn tay. Bàn tay con người có khả năng thực hiện vô vàn cử động: từ cầm, nắm, kéo, đẩy, búng, móc, nhấn, chọc đến kẹp, vuốt, đấm, chặt…
Liệt kê một danh sách chuyển động tương tự cho bất kỳ bộ phận nào trên cơ thể, bàn tay chắc chắn sẽ không bao giờ bị đánh bại. Đó là lý do Aristoteles từng khẳng định bàn tay là "công cụ của những công cụ". Sẽ không quá khi nói rằng toàn bộ nền văn minh trên Trái Đất ngày nay đều được xây dựng từ bàn tay của con người.

Mọi thứ đã bắt đầu từ 2 triệu năm trước tại Olduvai, một hẻm núi ở Đông Phi. Một người tiền sử thuộc chi Homo habilis đã cầm một viên đá trong lòng bàn tay và đập vào một viên đá khác dưới mặt đất.
Kết quả, anh ta đã có được một con dao đá với một bầu tròn để cầm nắm và một cạnh sắc còn lại để róc thịt. Công cụ bằng đá này được gọi là Mode 1, nó đã mở ra nền công nghiệp đồ đá tiền sử, không chỉ thúc đẩy sự tiến hóa của bàn tay, mà còn cả bộ não và nền văn minh nhân loại.
Việc phải cầm những công cụ bằng đá đã thay đổi nhiều đặc điểm giải phẫu trên bàn tay Homo habilis. Nó đẩy ngón cái về phía đối diện hoàn toàn với 4 ngón còn lại, một khác biệt lớn hơn so với người vượn. Độ dài của ngón cái cũng được cải thiện, trong khi các đốt xương ngón tay ngắn lại, tạo ra tư thế mà các nhà giải phẫu học ngày nay gọi là "tay cầm chính xác".
Tay cầm chính xác sau đó tiếp tục giúp tổ tiên của chúng ta đánh đá lấy lửa, đẽo gỗ thành bánh xe và xây kim tự tháp. Nhưng ở chiều ngược lại, chúng cũng gây ra tác dụng phụ.



Càng sử dụng bàn tay thành thục, con người càng tạo ra nhiều công cụ phù hợp với tư thế cầm nắm của chúng. Từ cán rìu, tay nắm cửa cho đến chuột máy tính, toàn bộ thế giới mà chúng ta kiến thiết chỉ có UX/UI thân thiện với bàn tay. Đã là cốc thì phải có tay cầm, túi thì phải có quai xách và các phím máy tính phải được đặt ở vị trí phù hợp với từng ngón tay riêng biệt.
Ngoại trừ bóng đá, môn thể thao trong đó chúng ta tự thách thức đôi chân của mình, hiếm có hoạt động thường ngày nào mà mọi người cần đến thao tác khéo léo ở hai chi dưới. Bạn có thể nghĩ đến chân ga và chân phanh trên ô tô phải không? Nhưng những bàn đạp này giống với pedal của đàn piano chỉ được thiết kế ra khi hai bàn tay của bạn đã bận rộn.
Còn tính năng đá cốp, trước năm 2012, không một chiếc xe nào có thể mở được cốp chỉ bằng một cú đá chân. Cho đến khi các kỹ sư của Ford nói rằng họ cần giúp những người đang phải bê đồ bằng hai tay và không còn lúc nào rảnh để ấn nút.
Những bàn chân nếu có thể lên tiếng, chúng sẽ nói với bàn tay rằng: "Anh hẳn phải tuyệt vọng lắm mới tìm đến sự giúp đỡ của tôi".

Tất nhiên, một thế giới có UX/UI phù hợp với bàn tay thì cũng sẽ thuận tiện cho con người. Nhưng nó sẽ trở ác mộng với bất cứ sinh vật nào không sở hữu bàn tay như họ. Hãy tưởng tượng một ngày đẹp trời, có một chủng người ngoài hành tinh đến thăm Trái Đất và chỉ có tám xúc tu như bạch tuộc.
Anh ta vẫn bắt được tay, mở được cửa taxi hoặc rút tiền ở ATM. Nhưng rắc rối sẽ xảy ra nếu bạn mời anh ấy ăn bún chả. Người ngoài hành tinh này sẽ phải dùng 2 xúc tu để ngồi, 2 chiếc nữa để cầm đũa. Và khi ngắt một cọng rau sống, nhiều khả năng anh ta sẽ phải dùng tới 4 xúc tu còn lại, giống với cách chúng ta dùng 4 ngón tay trong trường hợp bạn không có móng.
Vậy là, toàn bộ số chi trên cơ thể người ngoài hành tinh này đã được huy động chỉ để ăn một bát bún chả. Không còn tay nào rảnh bấm điện thoại, đối với anh ấy, ngay cả việc lái phi thuyền đến Trái Đất có lẽ cũng không vất vả đến thế.
Ra khỏi quán bún, người ngoài hành tinh còn được phát một chiếc kẹo cao su Cool Air, nhưng cá là anh ấy sẽ cầm về tận nhà vì không thể bóc được nó:

Viễn cảnh về chuyến thăm của người ngoài hành tinh nói lên một điều rằng, nếu một chủng loài muốn tồn tại một cách "mượt mà" trong thế giới UX/UI của chúng ta, nó có thể không có khuôn mặt, không có thân hình giống con người, nhưng nhất quyết phải có bàn tay giống với con người.
Đó là lý do tại sao Evelyn Wang, nhân vật của Dương Tử Quỳnh trong Everything Everywhere All At Once, sở hữu bàn tay xúc xích là một sự phi lý. Một robot không có bàn tay như Doraemon cũng vậy.
Thật khó để tưởng tượng nó sẽ tồn tại trong thế giới của chúng ta như thế nào? Không có bàn tay, mọi công nghệ giải thích cho khả năng cầm nắm của Doraemon đều trở nên khiên cưỡng. Từ bàn tay có giác hút, được làm từ vật liệu biến hình cho đến việc nó có lực hút tương đương một Trái Đất thu nhỏ. Không có một kịch bản nào là khả thi ngoài đời thực.
Và khi nhìn lại những cánh tay robot công nghiệp không bàn tay, chúng ta thấy chúng chỉ có thể hoạt động được bên trong các nhà máy, nơi có dây chuyền sản xuất đã được thiết kế và lập trình ra dành riêng cho chúng. Bên ngoài đời thực, những cánh tay robot này sẽ trở thành đống sắt vụn vô dụng, bởi đó là một thế giới không được thiết kế cho UX/UI của chúng.

Tất cả những giả thuyết kể trên củng cố một lập luận, rằng nếu bạn muốn kiến thiết một tương lai mà ở đó mọi người có thể mua robot quản gia, robot giúp việc hoặc thậm chí có một phiên bản như T-800, trước hết, bạn phải tìm cách chế tạo ra được bàn tay máy.
Thật đáng tiếc, đó lại là một nhiệm vụ khó khăn hơn bạn tưởng.
Ngay cả trong Kẻ hủy diệt, tiến sĩ Dyson cũng không thể tự mình tạo ra chúng. Ông đã phải bắt chước những công nghệ có sẵn trong bàn tay T-800 từ tương lai để lại. Có nghĩa là về cơ bản, T-800 đã tự tạo ra chính nó, trong một vòng lặp thời gian mà con người không thể sáng tạo ra công nghệ bàn tay máy.

Quá trình tiến hóa của bàn tay gắn liền với ba cột mốc chính, tương ứng với ba lần "chuyển nhà" của các sinh vật trên Trái Đất. Cột mốc đầu tiên cách đây 380 triệu năm, khi Tiktaalik, một loài cá vây thùy nước ngọt, bỗng dưng muốn đi bộ lên mặt đất.
Trong quá trình nhón hai vây trước để nâng cỡ cơ thể trên cạn, những con Tiktaalik đã phát triển một số khớp xương và cơ tiền thân của cổ tay và bàn tay. Bằng chứng giải phẫu cho thấy những cơ xương này không xuất hiện trong cả cẳng tay, khuỷu tay và cánh tay con người, nhưng vẫn còn hiện diện trên bàn tay của chúng ta.
Do đó, trái với trực giác, bàn tay đã có một lịch sử tiến hóa lâu đời hơn toàn bộ cánh tay còn lại.

Cột mốc thứ hai xuất hiện sau 320 triệu năm, khi các loài sinh vật trên cạn đã bào mòn sự phát triển của bàn tay để có 4 chi bình đẳng, cân bằng giúp chúng phi nước đại được trên mặt đất. Nhưng bỗng lại một ngày, Tupaiidae, một loài chuột chù đang sống yên ổn ở mặt đất lại muốn chuyển nhà lên trên cây.
Thế là chúng bắt đầu phát triển bàn tay trở lại, hình thành nên năm ngón với các khớp cho khả năng cầm nắm tốt. Đây chính là điểm khởi đầu cho quá trình tiến hóa của bàn tay linh trưởng, kéo dài trong suốt hơn 54 triệu năm sau, giúp tổ tiên của chúng ta chuyền cành, hái quả và tự vệ.


Mọi chuyện đi tới một bước ngoặt khác vào 3,6 triệu năm trước, khi những loài vượn lớn lại di cư ngược từ trên cây trở lại mặt đất. Tư thế đứng thẳng đã giải phóng bàn tay của chúng khỏi nhiệm vụ di chuyển. Điều này bất ngờ trao cho bàn tay cơ hội để phát triển. Chúng bắt đầu tiến hóa một cách thần tốc để không chỉ sở hữu sức mạnh, độ linh hoạt mà còn cả sự khéo léo.
Câu chuyện được tiếp nối, như đã kể, ở hẻm núi Olduvai khi những người Homo habilis chế tạo ra công cụ bằng đá. Vì vậy, trong khi bàn tay con người chỉ có lịch sử tiến hóa kéo dài khoảng 2 triệu năm, hệ thống xương khớp và cơ tiền thân của nó đã xuất hiện trên Trái Đất từ 380 triệu năm trước.

Hành trình chọn lọc tự nhiên vĩ đại trang bị cho bàn tay con người ngày nay 27 xương riêng lẻ, tương ứng với chúng là 27 khớp, 34 bó cơ và 123 dây chằng. Điều này biến bàn tay bạn trở thành nơi có mật độ xương, khớp cao nhất cơ thể.
Chỉ với thể tích bằng 1,5%, hai bàn tay chứa tới 15% tổng số lượng khớp và 25% tổng số lượng xương trên người bạn.
Chưa kể, hầu hết các xương và khớp trên bàn tay của con người có phạm vi chuyển động lớn và cực kỳ chính xác. Đó là điều tạo nên sự khác biệt. Bởi cũng với 26 xương, 33 khớp, 19 cơ và 57 dây chằng, bàn chân của bạn lúc này đang không làm được gì hơn việc ngọ nguậy dưới gầm bàn.
Ngược lại, bàn tay bạn có thể làm mọi thứ, từ nâng tạ, soạn thảo văn bản cho tới xỏ một sợi chỉ qua lỗ kim khâu.

"Bàn tay là một trong những cấu trúc sinh học phức tạp và đẹp nhất trên cơ thể con người. Nó mang lại cho chúng ta khả năng cầm nắm chắc chắn, nhưng cũng cho phép chúng ta điều khiển các vật thể nhỏ ở độ chính xác vô cùng cao", Tiến sĩ George McGavin, giáo sư tại Đại học Oxford cho biết.
"Sự linh hoạt của bàn tay chính là thứ phân biệt chúng ta với mọi loài sinh vật khác trên Trái Đất". Thật vậy, hãy thử giơ một bên bàn tay của bạn lên, dùng ngón tay cái chạm vào từng đầu của 4 ngón tay còn lại. Sau đó, hãy xoay cổ tay mình 180 độ. Nắm tay của bạn lại thành nắm đấm rồi dùng ngón cái siết chặt ngón trỏ, ngón giữa và ngón đeo nhẫn.
Trong khi bạn có thể làm những điều này một cách dễ dàng, không một con vượn hay động vật linh trưởng nào khác có thể thực hiện chuỗi thao tác đó.
Một ví dụ nữa cho thiết kế tinh tế của bàn tay con người là ngón út, ngón tay mà bạn thường nghĩ là vô dụng nhất. Nhưng hãy thử làm một thí nghiệm đơn giản này: Nắm chặt một chiếc bút trong lòng bàn tay trái, sau đó cố gắng dùng tay phải để kéo chiếc bút ra khỏi đó.
Lặp lại thí nghiệm với ngón út thả ra, nghĩa là bạn chỉ nắm 4 ngón tay còn lại, bạn sẽ thấy chiếc bút lúc này bị rút ra rất dễ dàng. Điều này chứng minh ngón út đóng vai trò rất lớn trong việc cầm nắm của bạn.
Thay vào đó, nếu bạn thả ngón trỏ, lực nắm của tay bạn thực sự không suy giảm là mấy.
Đó là lý do mà các nhà giải phẫu học ngày nay đồng ý rằng: Nếu phải chọn từ bỏ một ngón tay, thà bạn từ bỏ ngón trỏ của mình còn hơn là ngón út. Sự thiếu hụt của ngón trỏ vẫn sẽ mang về 9,5 điểm trên thang đo cầm nắm.
Ngoài ra, nghiên cứu cho thấy ngay sau khi ngón trỏ biến mất, các dây thần kinh của não bộ sẽ được định vị lại để biến ngón giữa thành một ngón trỏ mới cho bạn. Mọi thứ bạn làm với ngón trỏ, từ cầm bút, cài cúc áo cho đến nhấn chuột trái đều có thể được thực hiện bằng ngón giữa.
Vì vậy, mất ngón trỏ thì bạn chỉ cần một đợt tinh chỉnh firmware để vá lỗi. Trong khi, mất ngón út đồng nghĩa với việc bạn mất luôn cả một phần cứng không thể thay thế. Nó sẽ ảnh hưởng trực tiếp tới khả năng cầm nắm đã tiến hóa trong 2 triệu năm của bạn.
Tất cả những sự tinh tế này đặt ra cho các kỹ sư robot một nhiệm vụ khó khăn, khi họ muốn mô phỏng lại bàn tay con người với toàn bộ công năng, sự kỳ diệu cũng như tinh tế mà chúng đang sở hữu.

Nếu bạn cần một điểm mốc để bắt đầu giấc mơ này, thì đó là năm 1495, khi Leonardo da Vinci giới thiệu mẫu robot Knight của ông ấy tại một buổi lễ ở Milan do công tước Ludovico Sforza tổ chức.
Knight hôm đó đã trình diễn khả năng đứng, ngồi, nâng tấm che mặt, tất cả nhờ vào một hệ thống ròng rọc và dây cáp, kết nối với những bánh răng dẫn động được đặt bên dưới chân đế.
Thông qua các bản vẽ phác thảo robot này trong Codex Atlanticus, tập sách dày 2.238 trang thu thập lại toàn bộ các bản vẽ phác thảo của thiên tài người Ý, các kỹ sư và học giả hiện đại đồng ý rằng Knight của da Vinci chính là robot hình người được lập trình đầu tiên trong lịch sử.
Nó có phần cứng là bản thân robot với các khớp nối ở vai, khuỷu tay, cổ tay và bàn tay. Phần mềm chính là những bánh răng dẫn động bên dưới, hay cam gỗ, có thể được thiết kế và sắp xếp giúp robot thực hiện các chuyển động khác nhau.

Ghi chép về Knight tiết lộ nó có cánh tay cử động độc lập, có thể thực hiện nhiều hành động như chìa ra bắt, đánh trống hoặc ôm người đối diện. Nhưng có một tin đồn chưa được kiểm chứng, Knight biết vẽ.
Đáng tiếc, không có phác thảo cụ thể nào nói về bàn tay biết vẽ của Knight trong Codex Atlanticus. Nhưng vào năm 2018, một nghệ sĩ thiết kế người Mỹ, Robert Sabuda đã quyết tâm nghiên cứu để phục dựng một phiên bản mà ông cho là bàn tay robot da Vinci đã thiết kế.
Nó có khả năng là một hệ thống dẫn động bằng bánh xe gỗ, cũng có thể được lập trình đơn giản để vẽ ra được các mẫu hình khác nhau. Bàn tay được Sabuda đặt tên là Drawmation có hai khớp tương ứng với hai bậc tự do. Nó cho phép bàn tay này điều khiển một chiếc bút trên không gian 2 chiều của tờ giấy, nhưng đầu bút không thể nhấc lên được, khiến tất cả các bức vẽ của Drawmation, thực ra, chỉ có một nét.
Drawmaton - một mẫu robot được phục dựng dựa trên cảm hứng từ công trình của Leonardo da Vinci
Bậc tự do (degrees of freedom – DoF) là một khái niệm trong ngành robot học, được định nghĩa là "số biến độc lập xác định vị trí hoặc chuyển động có thể có của một hệ thống cơ học trong không gian". Hiểu một cách đơn giản, mỗi bậc tự do tương ứng với một khớp trên robot cho phép nó tạo ra chuyển động quay hoặc tịnh tiến.
Đa số các cánh tay robot mà bạn thấy trong các nhà máy của con người ngày nay chỉ có 6 bậc tự do. Chúng có 1 khớp đế, 2 khớp cánh tay, và một tổ hợp khớp cổ tay có thể xoay theo 3 hướng.
Phía trên khớp cổ tay, các cánh tay robot này sẽ được lắp thêm một thiết bị hiệu ứng cuối (End effector). Nó có thể là một cái kẹp gắp, nam châm hoặc súng hàn, cung cấp thêm một bậc tự do về mặt chức năng cho robot.

Về mặt lý thuyết, các cánh tay robot trong nhà máy chỉ cần tối thiểu 6 bậc tự do để tiếp cận mọi vị trí trên lưới tọa độ Descartes. Có nghĩa là robot 6 bậc được coi là "tự do hoàn hảo". Tuy nhiên, chính thiết bị hiệu ứng cuối lại giới hạn những gì mà một robot có thể làm được.
Nếu End effector là một bàn tay cầm bút cố định như của Drawmation, nó chỉ có thể cầm bút và vẽ. Nếu End effector là một khẩu súng hàn, nó chỉ có thể trở thành robot hàn. Nếu End effector là máy đánh trứng, nó chỉ có thể đánh trứng.
Điều đó nói lên rằng chính thiết bị hiệu ứng cuối cũng cần mở rộng bậc tự do của chúng. Con người, đang sở hữu một End effector với 27 bậc tự do gắn trên cánh tay của mình. Đó chính là những bàn tay với 27 khớp xương chuyển động linh hoạt.
Đến đây, có thể nói rằng một thế giới mà chúng ta đang thiết kế phù hợp với bàn tay chính là thế giới có UX/UI phù hợp với 27 bậc tự do mà bàn tay chúng ta sở hữu.
Chỉ cần tái tạo lại được 27 bậc tự do của các khớp xương đó sang bàn tay máy, robot về lý thuyết sẽ thực hiện được tất cả các thao tác mà con người có thể. Bạn sẽ có được robot quản gia, robot giúp việc và thậm chí Arhur, một robot bartender khéo léo như trong Passenger (2016).

Trở lại với Dactyl, bàn tay máy mà OpenAI đang huấn luyện tại trụ sở của họ ở San Francisco. Nó mới chỉ đạt tới được 20/27 bậc tự do so với bàn tay con người. Con số thấp hơn 2 bậc so với MPL v2.0, bàn tay do Phòng thí nghiệm Vật lý Ứng dụng Đại học Johns Hopkins chế tạo.
Với một khoản tài trợ lên tới 120 triệu USD từ Cơ quan Chỉ đạo các Dự án Nghiên cứu Quốc phòng Tiên tiến Hoa Kỳ (DARPA), MPL v2.0 đã đạt được 22/27 bậc tự do so với bàn tay người.
Kỷ lục bàn tay máy với bậc tự do gần với bàn tay người thật nhất đang được nắm giữ bởi Clone Robotics, một công ty chế tạo robot của Ba Lan. Tháng trước, họ vừa giới thiệu một bàn tay robot được làm từ sợi carbon với cấu trúc giải phẫu giống với bàn tay người thật nhất từ trước đến nay.
Bàn tay được gọi là Clone Synthetic Hand v18 cấu tạo từ 27 khớp và 37 bó cơ. Điều này cho phép nó đạt được toàn bộ 27 bậc chuyển động tự do của bàn tay người bao gồm: ngón tay cái xoay tự do, các ngón tay co gập, chuyển động trái phải, cổ tay xoay được, tái tạo tư thế sấp và ngửa của cẳng tay, khóa khớp khuỷu tay…
Clone Synthetic Hand v18 đã tái hiện lại được "tay cầm chính xác", thứ mà người Homo habilis đã bắt đầu phát triển cách đây 2 triệu năm.
Clone Robotics cho biết đây là lần đầu tiên một bàn tay robot có thể thực hiện được tất cả những điều đó với sự tự nhiên và linh hoạt giống với bàn tay người thật. Trong một video được công ty công bố, Clone Synthetic Hand đã thể hiện khả năng cầm nắm một loạt các đồ vật từ bóng tennis, máy khoan cho đến chai nước.
Động tác mà nó thể hiện đúng là thứ mà các nhà giải phẫu gọi là "tay cầm chính xác", thứ mà người Homo habilis đã bắt đầu phát triển cách đây 2 triệu năm. Dhanush Radhakrishnan, đồng sáng lập của Clone Robotics cho biết: "Đây là một bản sao 1:1 với bàn tay con người và là một trong những robot cơ xương đầu tiên trên thế giới. Chúng tôi đang sở hữu những bàn tay khỏe nhất và mô phỏng sinh học sát thực nhất hành tinh".

Nhìn vào sự chuyển động của Clone Synthetic Hand, bạn sẽ thấy bàn tay này sở hữu những chuyển động mượt mà hơn nhiều so với những bàn tay robot khác. Một nửa bí quyết của nó, như đã nói, nằm trong 27 khớp tự do mà bàn tay mô phỏng giống với giải phẫu của bàn tay người thật. Nửa còn lại nằm ở các bó cơ trong cánh tay.
"Bàn tay có một trong những cách sắp xếp cơ bắp kỳ lạ nhất trên cơ thể. Hầu hết các chuyển động của nó được điều khiển bởi các cơ hoàn toàn không nằm ở bàn tay mà ở cẳng tay", tiến sĩ George McGavin giải thích.
"Các cơ của cẳng tay kết nối với xương ngón tay thông qua các gân dài đi qua cổ tay linh hoạt. Hệ thống cơ từ xa này mang lại cho các ngón tay sự chuyển động và sức mạnh mà sẽ không thể có được nếu tất cả các cơ được gắn trực tiếp vào chúng. Trên thực tế, bàn tay chỉ đơn giản là một con rối bằng xương, được buộc bằng dây chằng và điều khiển bởi cẳng tay".
Nhìn vào Clone, bạn sẽ thấy bàn tay chỉ là một con rối bằng xương, được buộc bằng dây chằng và điều khiển bởi cẳng tay
Vì vậy, nếu một bàn tay robot sử dụng mô tơ hoặc xi lanh thủy lực đặt ở mỗi khớp, nó sẽ không bao giờ tái tạo lại được chuyển động uyển chuyển như bàn tay con người. Clone Synthetic Hand, thay vào đó, sử dụng chính những bó cơ nhân tạo ở cẳng tay.
Những bó cơ này được Łukasz Kozlik, đồng sáng lập của Clone Synthetic Hand cải tiến dựa trên cơ chế PAM (cơ nhân tạo khí nén). PAM ban đầu là những ống lưới có bóng khí bên trong. Khi được bơm khí nén, quả bóng sẽ nở rộng tạo ra áp suất hướng tâm khiến ống lưới co lại theo chiều dọc.
Ưu điểm của PAM là chúng sử dụng màng lưới mỏng, nhẹ và có khả năng bắt chước sinh học tốt hơn các cấu trúc xi lanh cứng nhắc. Nhưng nhược điểm là nó cần tới một hệ thống máy bơm cồng kềnh. Do đó, Kozlik bây giờ muốn loại bỏ chiếc bơm này bằng cách cải tiến PAM, sử dụng một quả bóng chứa chất lỏng thay vì không khí.
Để khiến quả bóng nước nở ra, Kozlik không bơm khí nén nữa mà anh sẽ đun sôi chất lỏng bằng dòng điện. Ví dụ như nếu chất lỏng nạp vào acetaldehyde, quá trình đun sôi nó từ 20 lên 70 độ C sẽ đưa được quả bóng từ áp suất khí quyển lên áp suất gấp 6,6 lần và tạo ra sức mạnh cho nó.
Các cơ PAM cải tiến này có thể đạt được tỷ lệ sức mạnh/trọng lượng gấp từ 5-10 lần, so với động cơ điện và xi lanh mà các cánh tay robot thông thường được trang bị.
Cơ PAM thủy lực và sức mạnh mà chúng tạo ra cho bàn tay của Clone Robotics
Dactyl, bàn tay máy mà OpenAI đang huấn luyện tại trụ sở của họ ở San Francisco, cũng sở hữu 20 cơ PAM, đem đến cho nó chuyển động uyển chuyển và tương đối mượt mà. Nhưng tại sao chúng ta lại cần một bàn tay robot uyển chuyển?
Hóa ra, câu trả lời không hề đơn giản. Vào năm 1970, Masahiro Mori là một giáo sư robot người Nhật đã dự đoán được một tương lai, trong đó con người có thể chế tạo ra những cỗ máy có vẻ ngoài giống mình.
Giáo sư Mori cho biết con người sẽ cảm thấy đồng cảm và thân viện với những cỗ máy đó, khi ngoại hình của chúng ngày một giống người hơn. Nhưng tới một điểm, khi sự giống nhau bị đẩy đến một ngưỡng giả trân thái quá, sự đồng cảm đột nhiên biến mất, thay vào đó là cảm giác khó chịu, rùng rợn hoặc thậm chí ghê tởm.

Các nhà làm phim thường tận dụng hiệu ứng này để tạo ra các nhân vật như zombie, xác ướp hoặc búp bê ma ám – những thực thể có vẻ ngoài giống người nhưng cử động một cách phi tự nhiên.
Bạn cũng có thể trải nghiệm cảm giác khó chịu khi xem các bộ phim sử dụng công nghệ CGI đời đầu như Final Fantasy: The Spirits Within (2001), hoặc là các hình ảnh biên tập viên ảo xuất hiện đầy rẫy trên TikTok những ngày này.
Thế nhưng, giáo sư Mori gọi hiệu ứng này là "thung lũng kỳ lạ", điều đó có nghĩa là nó còn có một sườn dốc nữa. Một khi vượt qua được ngưỡng giả trân, những robot có vẻ ngoài tiệm cận với con người mới lấy lại được sự đồng cảm.
Thật không may, trong tất cả các bộ phận của robot thì bàn tay máy thường là đối tượng dễ nằm dưới đáy thung lũng kỳ lạ nhất. Đó là bởi cấu trúc giải phẫu của nó cực kỳ khó mô phỏng. Chuyển động của các bàn tay máy thường đem lại cảm giác giật khục, thiếu tự nhiên và kém mượt mà.

Vì vậy, để tạo ra sự thân thiện, các nhà sản xuất robot được khuyến cáo nên cân nhắc 2 lựa chọn. Một là, họ nên dừng lại ở bên này sườn dốc, tạo ra các bàn tay máy hạ cấp, kém mô phỏng bàn tay người thật nhưng đáng yêu. Còn một khi họ có ý định tạo ra bàn tay robot giống người thật, họ phải tạo ra những bàn tay giống nhất có thể.
Chỉ có cách này, cảm giác thung lũng kỳ lạ mới bị xóa bỏ và robot mới có thể chung sống với con người mà không tạo ra cảm giác ghê sợ.

Đứng giữa hai sự lựa chọn chưa bao giờ là dễ dàng. Đó là lý do các robot hình người được chế tạo trong những năm gần đây cũng chia làm hai thái cực. Một bên, chúng ta có Asimo của Honda, NAO và Pepper của SoftBank Robotics. Đây là những phiên bản robot có ngoại hình đáng yêu, không mô phỏng theo đúng tỷ lệ giải phẫu học của con người để tránh phải bước xuống thung lũng kỳ lạ.
Ở phía còn lại, Optimus của Tesla, Ameca của Engineered Arts và Sophia của Hanson Robotics là những robot mang khuynh hướng siêu thực. Chúng chấp nhận dấn thân vào thung lũng để đổi lấy những chức năng mạnh mẽ mà giải phẫu học cơ thể người mang lại.



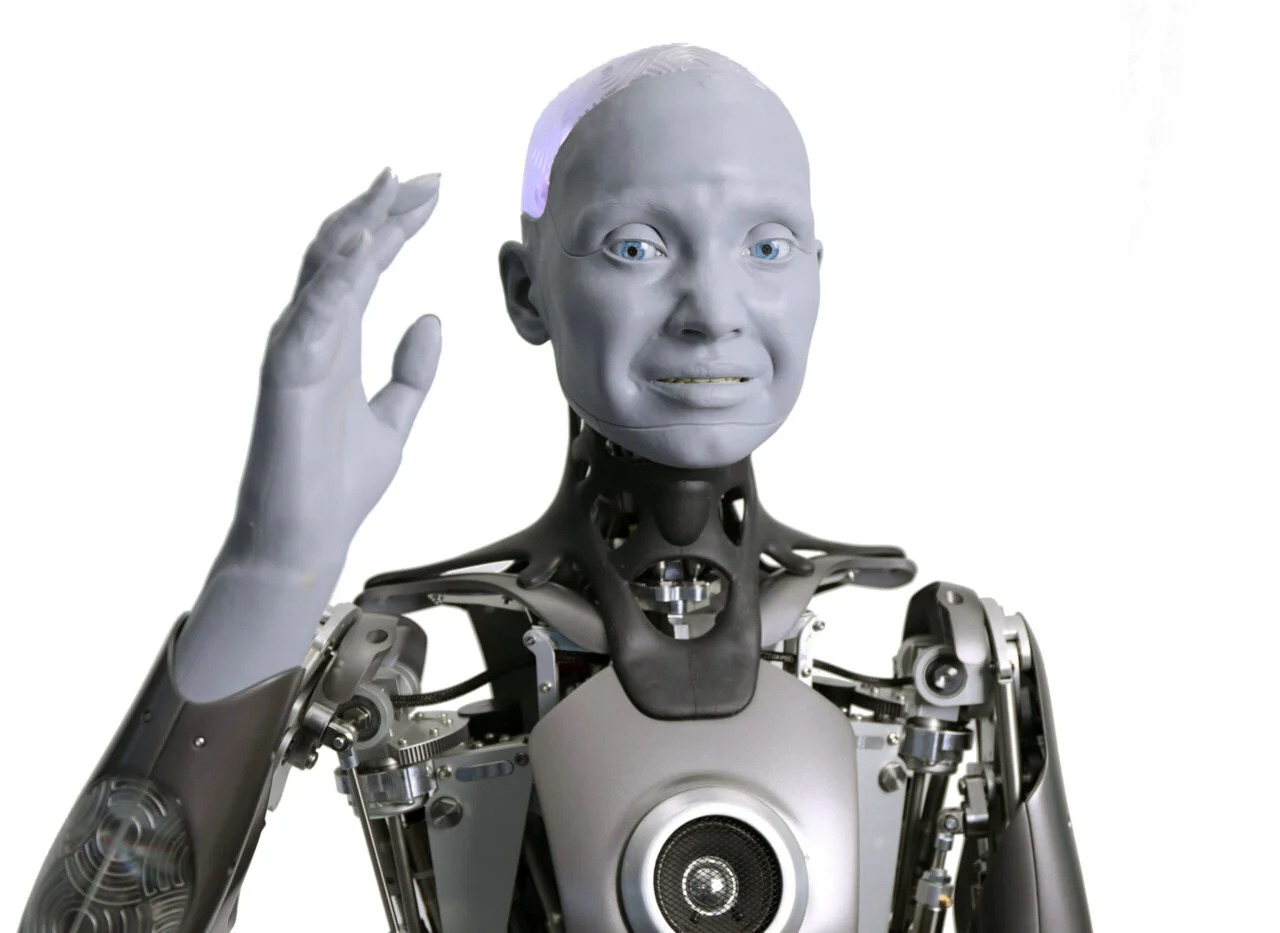
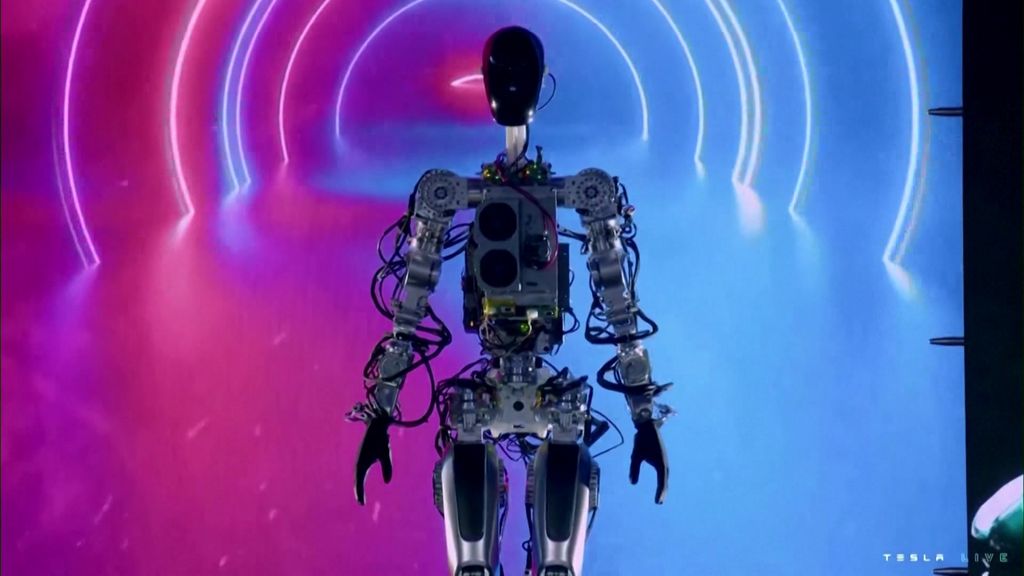

Trong khi Asimo, NAO và Pepper chọn vẻ ngoài đáng yêu để tránh thung lũng kỳ lạ, Ameca, Optimus và Sophia lại chọn bước xuống đó để đi tìm sức mạnh mà giải phẫu học giống với con người có thể mang lại.
Dactyl của OpenAI và Clone Synthetic Hand là những bàn tay robot thuộc nhóm thứ hai. Nhưng họ còn chọn tạo ra những bàn tay máy này còn vì một lý do đặc biệt khác. Cả hai đều muốn đào tạo bàn tay robot của mình bằng dữ liệu – một lựa chọn mang tính cách mạng đi ngược lại tất cả những giáo trình dành cho robot từ trước đến nay.
Trong ngành công nghiệp robot truyền thống, khi một cánh tay robot được tạo ra, nó sẽ được trang bị cho một thiết bị hiệu ứng cuối (End effector), chỉ để phục vụ một nhiệm vụ. Các chuyển động của robot sau đó sẽ được lập trình riêng cho nhiệm vụ đó. Vì vậy, robot có thể hoàn thành nhiệm vụ này một cách dễ dàng và nhanh chóng.
Đổi lại, những cánh tay robot này không có khả năng thực hiện nhiệm vụ khác, trừ khi End effector được thay thế và robot được nạp vào phần mềm mới trong một quá trình rất mất công sức và tốn kém.

Logic vận hành này cũng dẫn tới một hệ quả là các hãng sản xuất robot không muốn tăng số bậc tự do cho cánh tay robot của mình. Điều đó được tính là một rủi ro vì tăng số bậc tự do đồng nghĩa với việc tăng số lượng motor và khớp nối có khả năng bị hỏng, tăng chi phí sản xuất, bảo trì và vận hành, đồng thời khiến việc lập trình robot trở nên khó khăn hơn.
Để tối ưu nhất, các cánh tay robot truyền thống thường được sản xuất với số bậc tự do tối thiểu, nhưng đem lại công năng tối đa với những gì chúng sở hữu.
Hãy lấy một ví dụ, bàn tay Dactyl với 20 bậc tự do phải mất tới hơn 4 phút để giải được một khối rubik. Kỷ lục của con người là 6,2 giây. Nhưng bạn có tự hỏi một robot chuyên giải rubik có thể làm điều đó trong bao lâu? Câu trả lời là 0,38 giây từ một robot hình hộp do MIT thiết kế với số bậc tự do là 6:
Robot được thiết kế bởi MIT năm 2018 có khả năng giải một khối rubik 3x3x3 trong 0,38 giây. Nguồn: Youtube.
Dactyl đang đi ngược lại hành trình của những robot giải rubik truyền thống. Thay vì được nạp vào những phần mềm chạy theo công thức giải rubik mà bạn có thể tải về ngay trên mạng, OpenAI chỉ đưa ra một nhiệm vụ cho Dactyl: "Hãy xoay rubik này để 6 mặt của nó đồng màu".
Sau đó, họ đào tạo bàn tay bằng một thuật toán học hỏi tăng cường (Reinforcement learning). Dactyl sẽ sử dụng các camera của nó để xác định vị trí và trạng thái của khối rubik sau mỗi cú lật ngón tay.
Bằng cách này, bàn tay sẽ dần dần dự đoán được vị trí và trạng thái tiếp theo mà khối rubik được đặt vào sau mỗi cử động của nó. Dactyl cũng sẽ biết mình cần phải làm gì trong bước tiếp theo để giải khối rubik.
Nhưng vấn đề nảy sinh ở đây là, Dactyl sẽ phải mất hàng triệu cú lật rubik, với tốc độ của nó tương đương với hàng chục năm thì mới có thể hoàn thành quá trình đào tạo. Rubik sẽ mòn, ai sẽ trả tiền điện, và ai là người ngồi canh để nhặt khối rubik lên mỗi lần Dactyl đánh rơi nó?
Ngay cả bản thân cơ nhân tạo của bàn tay robot này cũng có hạn sử dụng nhất định. Dactyl chắc chắn sẽ bị hỏng trước cả khi nó học được cách giải rubik.

Vì vậy, các kỹ sư tại OpenAI đã nghĩ ra một cách. Họ đã thiết kế ra một môi trường mô phỏng được gọi là Miền ngẫu nhiên tự động hóa (ADR). Để khi Dactyl và khối rubik cùng các thông số được đưa vào môi trường ảo này, nó có thể học tập mà không làm hao mòn thiết bị vật lý. Đồng thời, quá trình đào tạo cũng có thể được tua nhanh, rút ngắn hàng ngàn năm xuống chỉ còn vài tuần trong thế giới thực.
Kết quả, Dactyl đã học được cách giải một khối rubik 3x3x3. Đó là bằng chứng về mặt lý thuyết cho thấy một bàn tay robot có thể học hỏi bất kỳ nhiệm vụ nào mà bàn tay người có thể thực hiện.
Dectyl đã tự học được cách giải rubik từ con số 0. Các kỹ sư tại OpenAI không nạp bất kỳ một chương trình, hướng dẫn hay thậm chí biến số nào cho nó.
Clone Robotics, trong một tầm nhìn thậm chí còn tham vọng hơn nghĩ rằng, một khi các bàn tay robot được mô phỏng đủ giống với giải phẫu học của bàn tay người, chúng có thể học được cách cầm nắm đồ vật mà không cần tới môi trường mô phỏng:
"Trong 30 năm qua, internet đã tích lũy hàng triệu giờ dữ liệu video của con người. Và kể từ năm 2022, dữ liệu video trên internet này có thể được tận dụng cho quá trình đào tạo tự giám sát trước để khởi động bộ não robot, cho phép robot học các tác vụ mới chỉ từ một vài thao tác được biểu diễn cho chúng".

Nếu những điều này là đúng, hãy tưởng tượng một ngày bạn chỉ cần cho một bàn tay robot xem những video thao tác tay của con người trên Youtube, thuật toán học máy của nó sẽ có khả năng phân tích chuyển động tay đó để bắt chước theo y hệt. Những bàn tay robot này sau đó sẽ có thể học được mọi thứ, từ cách cầm đũa, rang cơm, cho đến phá khóa như Kỳ Anh thợ khóa.
Điều gì sẽ xảy ra sau đó?
Rốt cuộc, cả thế giới mà loài người xây dựng với UX/UI thân thiện với bàn tay sẽ không còn lạ lẫm với robot nữa. 500 năm là khoảng thời gian chúng ta dùng để tái tạo một bàn tay có giải phẫu giống với bàn tay người thật, thứ đã tiến hóa trong suốt 2 triệu năm. Nhưng khoảng cách từ lúc nó cầm lên khối rubik và xoay đến khi có một bàn tay máy biết cầm súng có lẽ chỉ là một con dốc trơn trượt.
Trong một kịch bản đen tối nhất, bóng dáng của Kẻ hủy diệt đang lờ mờ hiện ra, bên trong một tòa nhà màu ghi sáng nằm ở số 3180, Đường 18, nơi có một bàn tay máy với trí tuệ nhân tạo đang vụng về xoay khối rubik mất hơn 4 phút.
Tổng hợp