Hơn một thế kỷ qua, cái cách loài mèo luôn tiếp đất bằng bốn chân một cách thần kỳ đã làm đau đầu những bộ óc vật lý vĩ đại nhất, nhưng câu trả lời thỏa đáng nhất cuối cùng lại đến từ một nghiên cứu giải phẫu học đột phá.
- Vỡ mộng xe điện, Faraday Future tính “lừa” vận mệnh bằng robot nhân hình giá đắt gấp ba lần Tesla Optimus
- "Kẻ hủy diệt" của Honda ra mắt với giá 50 triệu: Đầy ắp công nghệ khủng, dằn mặt Air Blade
- Robot hình người lần đầu tiên đăng đỉnh núi cao 6000 mét, bước tiếp theo là thách thức đỉnh Everest
- Trào lưu cho thuê chó theo giờ tại Trung Quốc và góc khuất tàn nhẫn khiến vật nuôi kiệt quệ tâm lý
- Sở thú Trung Quốc trả lương gần nửa tỷ đồng để tuyển người giả gấu với điều kiện cấm nói chuyện kỳ lạ
Đối với giới khoa học, khả năng "ngã không bao giờ lật" của loài mèo từ lâu đã vượt ra khỏi giới hạn của một trò đùa dân gian để trở thành một bài toán hóc búa mang tính thời đại.
Suốt hơn một trăm năm qua, các nhà vật lý học đã mượn hình ảnh những chú mèo rơi tự do để xây dựng nên hàng loạt phương trình toán học phức tạp về chuyển động quay, sự bảo toàn mô-men động lượng hay các mô hình cơ học lý tưởng.
Tuy nhiên, mọi lý thuyết trừu tượng ấy dường như đã bỏ quên một bản chất cốt lõi: con mèo là một thực thể sinh học sinh động chứ không phải một vật thể cơ khí vô tri.

Câu đố về khả năng tiếp đất bằng chân của loài mèo đã thu hút các nhà vật lý hơn một thế kỷ qua, dẫn đến nhiều phương trình và mô hình cơ học về bảo toàn mô-men động lượng.
Mới đây, một công trình nghiên cứu mang tính bước ngoặt do nhà khoa học Yasuo Higurashi dẫn đầu tại Đại học Yamaguchi (Nhật Bản) đã lật ngược cách tiếp cận truyền thống.
Thay vì cố gắng nhồi nhét loài mèo vào những định luật cơ học khô khan, nhóm nghiên cứu đã đi sâu vào cấu trúc giải phẫu học của chúng, cụ thể là hệ thống cột sống - chiếc "chìa khóa vàng" mở ra lời giải cho khả năng giữ thăng bằng siêu đẳng này.
Bằng việc phân tích chuyên sâu các cột sống từ năm mẫu mèo được hiến tặng cho công tác khám nghiệm tử thi bệnh lý, nhóm của Higurashi đã bóc tách hai phân vùng chiến lược: vùng cột sống ngực (chạy dọc lưng trên và lưng giữa) và vùng cột sống thắt lưng (ở lưng dưới).
Các mô mềm xung quanh như dây chằng hay đĩa đệm vẫn được giữ nguyên vẹn nhằm đảm bảo tính chân thực tối đa. Khi đưa các mẫu vật này vào máy kiểm tra tải trọng để đo lực cản khi xoay, các nhà khoa học đã thu được một kết quả gây kinh ngạc cho giới chuyên môn.
Hóa ra, cột sống của loài mèo không hề có độ dẻo dai đồng đều từ đầu đến đuôi như người ta vẫn tưởng. Vùng cột sống ngực sở hữu một "vùng trung hòa" cực kỳ rộng lớn, lên tới khoảng 47 độ. Trong phạm vi này, phần lưng trên của mèo có thể vặn xoắn một cách vô cùng lỏng lẻo và dễ dàng mà gần như không gặp phải bất kỳ lực cản nào, trước khi đạt giới hạn chịu đựng ở mức 171 độ.
Ngược lại, vùng cột sống thắt lưng ở phía dưới lại là một câu chuyện hoàn toàn khác. Phân đoạn này gần như không có vùng trung hòa; nó thiết lập một cơ chế kháng lực tức thì đối với mọi áp lực vặn xoắn và nhanh chóng chạm ngưỡng giới hạn chỉ ở mức 57 độ.

Nghiên cứu phát hiện cột sống của mèo chia làm hai phần rõ rệt: vùng ngực (lưng trên/giữa) rất lỏng lẻo với vùng trung hòa lên tới 47 độ giúp xoắn cơ thể dễ dàng, trong khi vùng thắt lưng (lưng dưới) rất cứng và hầu như không có vùng trung hòa để giữ sự ổn định.
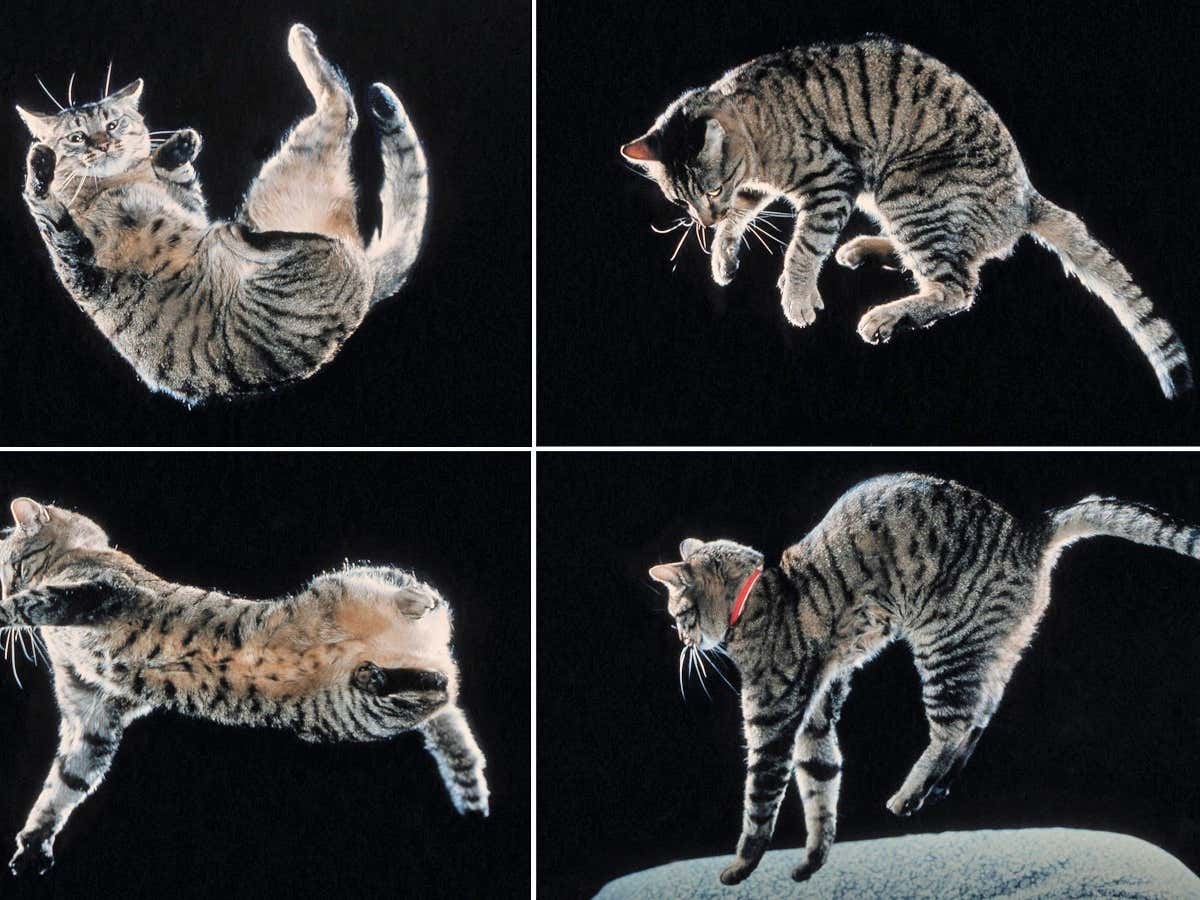
Sự tương phản sâu sắc trong cấu trúc giải phẫu này giải thích một cách hoàn hảo cho những thước phim quay chậm tốc độ cao về cảnh những chú mèo rơi tự do. Khi thử nghiệm thả hai con mèo sống từ độ cao một mét xuống một tấm đệm mềm, nhóm nghiên cứu ghi nhận nửa thân trước của chúng luôn hoàn thành cú xoay hướng về phía mặt đất nhanh hơn rất nhiều so với nửa thân sau.
Cấu trúc lỏng lẻo của cột sống ngực cho phép phần đầu và hai chân trước của mèo nhanh chóng thực hiện cú lật ngoạn mục ngay khi vừa rời khỏi tay người thả.
Trong khi đó, phần cột sống thắt lưng cứng cáp đóng vai trò như một chiếc neo định vị, giữ cho nửa thân sau xoay theo một cách trật tự giống như một chiếc rơ-moóc bám đuôi xe kéo, đồng thời ngăn toàn bộ cơ thể con vật bị sụp đổ vào một vòng xoắn hỗn loạn mất kiểm soát.
Phát hiện mang tính sinh học này không hề phủ nhận hay vi phạm các định luật vật lý, mà ngược lại, nó là minh chứng cho thấy sự tiến hóa đã tối ưu hóa cơ thể sinh vật để thích nghi với tự nhiên một cách tài tình ra sao. Từ năm 1894, nhà sinh lý học người Pháp Étienne-Jules Marey đã dùng ảnh chụp tốc độ cao để chứng minh mèo có thể tự lật người từ tư thế ngửa bụng mà không cần bất kỳ lực đẩy ban đầu nào từ bên ngoài.
Dù ở giữa không trung không có điểm tựa, mèo vẫn tuân thủ nghiêm ngặt định luật bảo toàn mô-men động lượng bằng cách chủ động thay đổi hình dáng cơ thể - co chi này, duỗi chi kia, uốn cong ở giữa để tự định hướng lại vị trí.
Nhà vật lý kiêm cây viết khoa học Gregory Gbur nhận định, loài mèo ngoài đời thực có lẽ đã kết hợp nhuần nhuyễn cả hai mô hình lý thuyết kinh điển là "co và xoay" (như vận động viên trượt băng thu tay để xoay nhanh hơn) lẫn "uốn và xoắn" (hai hình trụ xoắn ngược chiều nhau khi cơ thể uốn cong).
Đóng góp lớn nhất từ công trình của Đại học Yamaguchi là việc đập tan giả định lỗi thời coi cột sống mèo là hai khối hình trụ đồng nhất nối với nhau bằng một chiếc bản lề đơn giản. Việc cung cấp những thông số định lượng chính xác về độ linh hoạt của từng phân vùng cột sống mở ra một chương mới cho nhiều ngành khoa học ứng dụng.
Giờ đây, các kỹ sư sinh học và chuyên gia xây dựng mô hình đã có thể đưa những dữ liệu bất đối xứng thực tế này vào các thuật toán mô phỏng chuyển động động vật. Đối với y học thú y, phát hiện này cung cấp một tư duy nền tảng quan trọng trong việc chẩn đoán, điều trị các chấn thương cột sống cũng như các chứng rối loạn vận động ở loài bốn chân.
Đặc biệt, trong kỷ nguyên công nghệ cao, đây sẽ là một "bản thiết kế sinh học" vô giá cho các kỹ sư chế tạo robot linh hoạt, giúp các dòng máy móc tương lai có khả năng tự phục hồi thăng bằng cực nhanh khi rơi hoặc tự định hướng lại trong không trung một cách chuẩn xác và an toàn.

