Không chỉ muốn tạo ra một robot có người lái bên trong, người đàn ông này còn muốn tạo nên một giải đua người máy
Xa hơn nữa, Tippett còn muốn giải đua robot có người lái bên trong này có thể phát triển thành một môn thể thao có thể tham gia Olympic.
Nếu Jonathan Tippet đúng về cách làm của mình, giải Olympic trong tương lai sẽ không chỉ có sự tham gia của con người, thay vào đó còn có những vận động viên là robot với người điều khiển bên trong. Và tại sự kiện công nghệ ở Toronto vào tháng Bảy vừa qua, kỹ sư cơ khí người Canada này đã tưởng tượng về một cuộc đua nơi những người tham gia sẽ ngồi bên trong những cỗ máy cơ khí khổng lồ.
Và mọi người đã không phải tưởng tượng lâu khi chỉ rất nhanh sau đó Tippett đã giới thiệu vận động viên đầu tiên cho ý tưởng về cuộc đua người máy. Prosthesis, một bộ khung cơ khí lai sinh học chạy bằng điện, nặng 8.000 pound (khoảng 3,6 tấn), cao 15 foot (khoảng 4,5m), có thể khuếch đại chuyển động của người lái bên trong buồng lái. Được chế tạo từ thép màu, Prosthesis có thể chạy với tốc độ 21 dặm/giờ (khoảng 33 km/h), nhảy cao đến 10 feet (khoảng 3m) và hoạt động liên tục 2 giờ trong một lần sạc.
Các con số này cũng có một chút ấn tượng về kỹ thuật và sản xuất nhưng nhiều tháng sau đó, Tippett cho rằng nhiệm vụ của ông còn có nhiều ý nghĩa triết học hơn mọi người nghĩ. “Prosthesis có thể bị xem như một cỗ máy công nghệ cao, nhưng cỗ máy nặng 3,6 tấn này còn là phép ẩn dụ cho ta thấy công nghệ có thể cho phép chúng ta làm những gì mình muốn và vai trò quan trọng của con người trong ngành robot.”

Suy nghĩ đó là lý do tại sao Tippett và nhóm của mình tại Furrion, một hãng công nghệ Indiana hợp tác với ông để chế tạo Prosthesis, chọn việc bổ sung thêm buồng lái vào cỗ máy này và tạo ra một giao diện người điều khiển thay vì bảng điều khiển từ xa như chúng ta thường thấy trong các cuộc đua giữa các drone. “Prosthesis như một phần mở rộng cho cơ thể của người lái.” Tippett cho biết. “Nó giống như lái chiếc xe đạp núi, nơi trực tiếp mang tới trải nghiệm cho bạn thay vì bạn chỉ như một khán giả.”
Nhưng tham vọng của Tippett không chỉ dừng lại ở việc tạo ra một con robot có người điều khiển bên trong. Hiện tại ông đang tập trung vào việc đào tạo người lái và đảm bảo cỗ máy này được tinh chỉnh để sẵn sàng tham gia một cuộc đua. Thay vì bằng hai chân như các vận động viên, Prosthesis di chuyển bằng bốn chân giống như một con gorilla hơn. Vậy xa hơn một giấc mơ về
Từ một con nhện máy khổng lồ biết đi
Đây không phải lần đầu tiên mọi người gặp được Prosthesis. Cỗ máy cơ khí khổng lồ này đã xuất hiện tại nhiều hàng loạt sự kiện công nghệ như CES 2017 và Burning Man trong mùa hè vừa qua. Burning Man thực sự là nơi truyền cảm hứng cho tinh thần phát minh trong Tippett trước khi ông bắt tay vào Prosthesis.
Tại đây, Tippett và các kỹ sư đồng nghiệp của mình ở Vancouver có thể xây dựng nên Mondo Spider, một con nhện máy khổng lồ có thể chuyển động nhờ vào các động cơ thủy lực và motor. Sau đó, với sự ủy quyền của CODE Live, cỗ máy này chuyển sang sử dụng năng lượng điện, cho phép Mondo Spider hoạt động tương đối yên tĩnh, sạc bằng năng lượng mặt trời, và không phát ra khí thải.
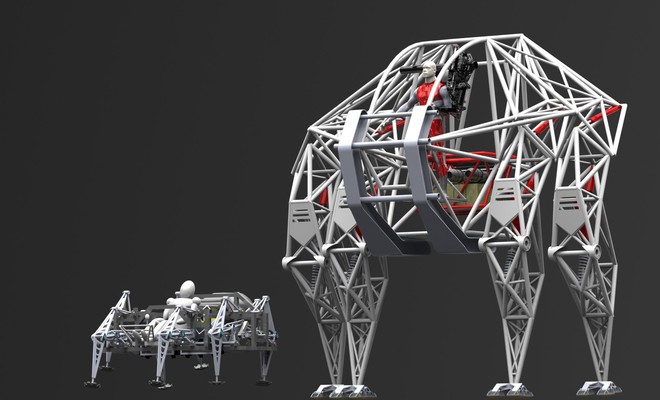
Mondo Spider bên cạnh Prosthesis.
Dự án Mondo Spider làm gia tăng sự tự tin về khả năng kỹ thuật của Tippett, giờ đây ông muốn một cái gì đó lớn hơn, nhanh hơn và trông ngầu hơn. "Vậy hãy tạo ra một chiếc tàu lượn siêu tốc có người lái." Tippett nhớ lại những ngày đầu tiên. "Ngồi trong buồng lái cách mặt đất 4m, sử dụng chân tay của mình để điều khiển chuyển động của cỗ máy ... nó sẽ mang lại cảm giác mất phương hướng, đáng sợ và ly kỳ, tất cả cùng một lúc."
Xây dựng một cơ thể người máy
Khi bắt đầu tiếp cận với Prosthesis, các chi tiết kỹ thuật của nó đã làm Tippett phải đau đầu. Hệ thống treo cho một cỗ máy biết đi nặng 3,6 tấn sẽ cần phải có những gì? Với việc di chuyển trên 4 chân so với 8, làm thế nào để đảm bảo cỗ máy này sẽ luôn cân bằng?
Không những vậy, đưa buồng lái vào trong người máy này là một điều rất quan trọng với tầm nhìn của Tippett. Sử dụng một bộ dây đeo 5 điểm, người lái sẽ đặt cánh tay của họ vào các nẹp kim loại và chân được những chiếc kẹp bọc quanh bắp chân. Sau đó chân tay còn được các món đồ tương tự bảo vệ để duy trì huyết áp ở mức bình thường.
Thay vì sao chép chính xác dáng đi của con người và Tippett lựa chọn cách lặp lại dáng đi bộ của gorilla, nhờ vào việc kết hợp giữa những lần sải bước ngắn của "tay" và chân. Trong buồng lái, cơ thể của người lái chuyển động để điều khiển bước đi của Prosthesis: gấp khuỷu tay lại và cỗ máy sẽ ngồi xổm. Duỗi tay ra và đẩy chân về phía trước, Prosthesis sẽ thực hiện động tác giống như cuộn người lại.
Để tăng cường sức mạnh cho các bốn chân máy này, mỗi chân của cỗ máy được trang bị hai bộ truyền động thủy lực. Bộ truyền động ở "hông" kết nối với phần chân trên, và cho phép nó xoay tiến về phía trước và quay về phía sau. Các bộ truyền động thứ hai kết nối với mặt sau của bộ khung do bốn thanh thép liên kết với nhau.
Việc thu lại bộ truyền động ở đầu gối này sẽ rút ngắn chân và nâng toàn bộ cỗ máy lên khỏi mặt đất khi bộ truyền động ở hông xoay chân ra đằng trước. Khi nó rời khỏi mặt đất, chiếc chân tiến về phía trước sẽ kéo dài ra để chạm vào mặt đất. Bộ truyền động ở hông có thể kéo chân ngược trở lại phía sau khi bộ giảm chấn đỡ cho sức nặng của cỗ máy và đệm xe.
“Điểm mấu chốt trong tất cả các bộ phận này là độ nhạy khi chuyển động.” Tippett cho biết. “Chúng tôi dành ra nhiều tuần để tinh chỉnh dây đai điều khiển, bộ giảm xóc và bộ hãm xung trong buồng lái để đảm bảo mọi thứ hoạt động hoàn hảo với người lái. Có thể nói rằng, việc thử nghiệm Prosthesis thực sự là một công việc mệt mỏi và đầy thách thức.”
Cũng như những người đi tiên phong khác, các mục tiêu cao cả của Prosthesis đòi hỏi rất nhiều lần thử sai. Thậm chí số lần Tippett ngã lộn người trong cỗ máy này nhiều đến mức, việc đó giống như tham gia vào một môn thể thao nào đó. “Khi học trượt tuyết, bạn phải ngã bao nhiêu lần trước khi bạn biết cách đi?” Ông nói. “Với Prosthesis, cũng cần đến rất nhiều lần thử sai như vậy.”
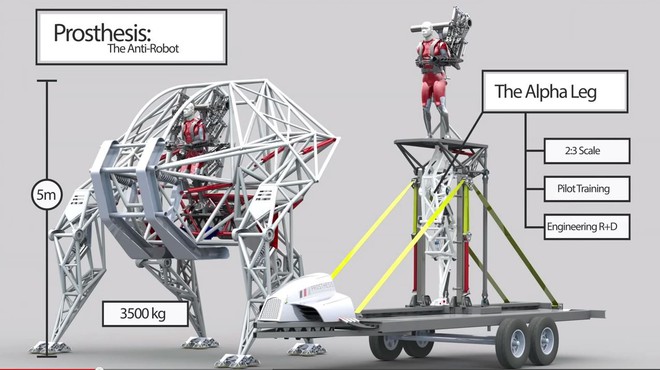
Xe dành cho việc tập luyện điều khiển Prosthesis.
Giữ được thăng bằng đúng là bước đầu tiên cho Tippett và nhóm của mình, và giờ ông đang tìm cách làm cho cỗ máy bước đi một cách mượt mà – nhưng vẫn chưa thể chạy. Tippett nhấn mạnh, bạn phải biết đi trước khi biết chạy chứ, đúng không?
“Hãy nhìn vào những người đang vận hành những chiếc xe tải quái vật đó, với cái cách họ thực hiện được bước vũ đạo đó.” Tippett cho biết. “Nó không khác gì mấy với Prosthesis. Đó là một yêu cầu về thể chất. Và cuối cùng, người hâm mộ sẽ trân trọng kỹ năng con người để điều khiển những con robot này.”
Đây cũng là điều ông luôn nhấn mạnh trong cuộc phỏng vấn, rằng “cỗ máy này được thiết kế xoay quanh người lái – không phải theo hướng ngược lại.” Theo ý nghĩa đó, cỗ máy này như một phần mở rộng cho cơ thể con người, tạo nên cảm giác cộng sinh giữa người và máy, một điều cho đến nay vẫn khó có thể tái tạo lại.
Các rào cản cho người đi đầu
Theo những chuyên gia về robot, Tippett sẽ phải đối mặt với nhiều thách thức ở phía trước. Ông Jonathan Hurst, CTO của Agility Robotics, cho rằng, chuyển động chân của cỗ máy này dù nhìn có vẻ rất dễ thực hiện, nhưng đó là một khó khăn thực sự. “Loại chuyển động này sẽ cần đến một hệ thống cơ khí được tính toán cẩn thận với đúng loại lò xo và độ trễ của việc điều khiển.” Ông cũng bổ sung thêm rằng, bất kỳ sự cản trở nào với bước đi của cỗ máy, như những nơi địa hình gồ ghề, cũng có thể loại bỏ động lực ở chân của nó.
Vào đầu năm nay, công ty Agility cũng đã giới thiệu một robot đi bộ bằng hai chân, Cassie, có thiết kế bán thân với bộ hông xoay tự do, tương tự như người. Thiết kế này cho phép Cassie xoay chân của mình về phía trước hoặc ngược lại, bước sang bên và quay chúng cùng một lúc. Ông Hurst cho biết, mình và đồng nghiệp sẽ sớm trang bị cho Cassie các cánh tay, thân trên và các cảm biến, nhưng họ đã sẵn sàng xuất xưởng phiên bản hiện tại cho các phòng thí nghiệm nghiên cứu.
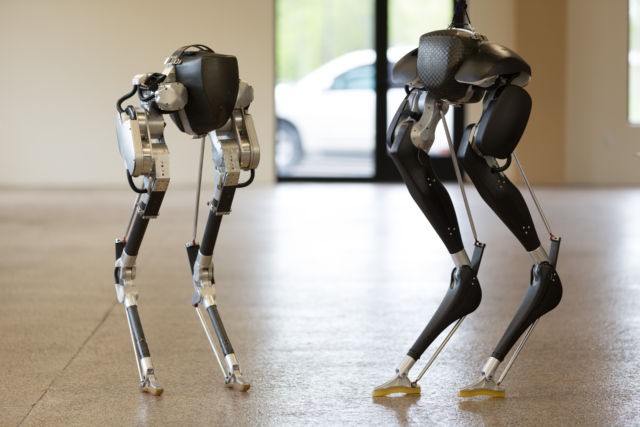
Robot Cassie của Agility.
Cách di chuyển của cả robot Cassie và Prosthesis đều tương tự như LS3, một robot đi bộ do Boston Dynamics chế tạo, được tiếp thị như một giải pháp vận tải cho quân đội. LS3 sau đã bị hoãn lại vào năm 2015 do nhiều giới hạn của nó, bao gồm cả tiếng ồn, các thách thức trong việc sửa chữa và khả năng tích hợp nó vào đội tuần tra biển.
Nhưng thách thức đối với các robot này không chỉ có vậy. Harmut Geyer, giáo sư tại Học viện Robotics của Đại học Carnegie Mellon, không muốn Prosthesis chịu đựng số phận như LS3. Ông cho rằng sự xuất hiện của Prosthesis còn có thể kích thích một giải đua người máy.
“Thách thức lớn nhất không chỉ ở việc điều khiển.” Geyer cho biết. “Liệu chiếc chân có đủ sức mạnh để chạy nhanh hay nó chỉ đủ tốt cho các chuyển động cụ thể? Và sau đó bạn cũng phải lo về việc quá nhiệt của động cơ nữa.”
Một số robot bốn chân khác cũng đã học được cách vượt qua các địa hình khó khăn, tuy nhiên đây lại không phải là một robot cơ khí như của Tippett và Hurst. Thay vào đó, nó là các robot bằng vật liệu cao su in 3D do trường Đại học California San Diego phát triển. Mặc dù vậy, nó đang được quảng bá là loại robot đầu tiên có khả năng đi bộ trên các địa hình gồ ghề với cát và sỏi.
Mặc dù vậy, tiềm năng tạo ra được các loại robot có chân này đang có sức hấp dẫn lớn đến nỗi một số trường đại học dành riêng ra các bộ phận cho thách thức này, ví dụ như phòng thí nghiệm Leg Laboratory của MIT.
Tạo nên các cuộc đua chứ không phải chiến tranh
Cho đến nay, có lẽ Prosthesis sẽ làm nhiều người nhớ đến những robot cơ khí khổng lồ khác từ các chuyên gia ở MegaBots, nơi vừa tổ chức một trận đối đầu giữa các cỗ máy khổng lồ này. Vào tháng Chín vừa qua, người máy MK. III của MegaBots với bề ngang to gấp đôi đối thủ Kuratas của hãng Suidobashi đến từ Nhật Bản. Đồng sáng lập của MegaBots, Gui Cavalcanti cho rằng, đó là “trận chiến robot khổng lồ đầu tiên trên thế giới.”
Cũng giống như ý tưởng về cuộc đua người máy của Tippett, Cavalcanti hướng tầm nhìn của mình tới các trận chiến robot với người điều khiển trong buồng lái. “Tất cả điều này là về vở kịch con người, một câu chuyện con người, trong thể thao.” Ông cho biết. “Khi bạn loại bỏ con người khỏi phương trình này, cao trào của vở kịch đó cũng đi xuống. Hãy nhìn vào trận chiến BattleBots, đó là một show diễn tuyệt vời, nhưng khi một robot bị xé nát thành nhiều mảnh nhỏ, camera cắt cảnh để chuyển sang cảnh nhà điều hành cau có đang cầm lấy bản điều khiển của mình. Điều đó không hấp dẫn. Chúng ta muốn xem cú nốc ao như một trận đấu quyền Anh.”

Nhóm tạo nên Prosthesis.
Tầm nhìn của Tippett đối với Prosthesis còn rộng lớn hơn thế nữa, ông muốn biến ý tưởng đua người máy thành một môn thể thao. Với tầm nhìn đó, ông có thể tìm thấy niềm cảm hứng của mình từ các vận động viên robot khác của giải đua The Drone Racing League (DRL). Teddy Tzanetos, cựu kỹ sư trưởng tại DRL và hiện đang nhà công nghệ robot tại NASA cho rằng, để ra mắt một môn thể thao mới, Tippett sẽ cần đến một kỹ năng cốt lõi để đáp ứng sự cường điệu của mọi người.
“Ông sẽ phải xử lý được thông điệp và kỳ vọng.” Tzanetos cho biết. “Khi nghe đến ‘đua người máy’ mọi người rất dễ tưởng tượng ra một cuộc đua khốc liệt giống như trong một trò chơi điện tử hơn bất cứ điều gì khác.”
Cho đến hiện tại, Tippett vẫn đang tiếp tục đạt được những bước tiến chậm rãi với việc đào tạo người lái. Hy vọng ban đầu của ông là kịp trình diễn người máy của mình tại triển lãm World Future Sport Games ở Dubai vào tháng Mười Hai này, nhưng việc vận chuyển những con quái vật khổng lồ này sẽ rất khó khăn và còn nhiều việc khác phải làm.
Điều này buộc ông phải đưa ra một thời hạn mới: tháng Tư năm 2018, để ra mắt Prosthesis trong cuộc đua đầu tiên của mình tại một địa điểm định sẵn. Tuy vậy, một vài việc trì hoãn và trở ngại này không cản được Tippett mơ về những tiềm năng cho giải đua này trong tương lai.

Robot Prosthesis bên ngoài văn phòng của Furrion.
Một số người máy được thiết kế để đua trên các bề mặt thông thường, trong khi những người máy khác có thể được thiết kế riêng cho các địa hình phức tạp hơn. Mỗi người máy sẽ có một đặc tính riêng, có lẽ có liên quan đến người lái trong buồng lái. Nếu các tay đua F1 có thể thu hút người hâm mộ bằng phong cách và sự tinh tế đặc trưng của mình, tại sao những người lái robot lại không thể làm vậy?
Nhưng Tippett cũng phải thừa nhận rằng, có lẽ các giải đua đối kháng vẫn chưa thể ra mắt trong thời gian trước mắt. Thời gian thử nghiệm sẽ hình thành nên giai đoạn đầu tiên của giải đua người máy, nơi các vận động viên có thể thay đổi vị trí trong Prosthesis. Khi mỗi người máy được điều khiển bởi cả chuyển động của con người và năng lượng, sức mạnh và tốc độ chạy của nó sẽ phụ thuộc hoàn toàn vào kỹ năng của người lái. “Tạo nên một người máy là một dự án đầy tham vọng, và tôi không nhất thiết phải xắn tay áo lên và nói “Lao vào đi, tôi đang chờ đây,”” Tippett cho biết. “Tôi biết rào cản để tiến vào lĩnh vực này là rất cao.”
Cho dù thách thức vẫn đang ở phía trước, nhưng Tippett vẫn lạc quan về cơ hội cho giải đua người máy. Ông cho rằng vấn đề là khi nào, không phải nếu nữa. “Khi người lái trình diễn tài năng của họ và phát huy hết tiềm năng những cỗ máy này, nó sẽ làm mọi người phấn khích, đặc biệt điều đó sẽ đi kèm với tiền của họ.” Cũng như những ngành công nghiệp khác, khi những yếu tố như vậy tới, chúng sẽ mang lại cơ hội và nhiên liệu để phát triển cho ý tưởng của Tippett.
Xa hơn nữa, giấc mơ với các vận động viên robot do người điều khiển của Tippett không chỉ dừng lại ở một vài cuộc đua. Với ông, chén thánh sẽ là việc đưa được cuộc đua người máy này tới Olympic. Nhưng khi Prosthesis mới chỉ đi bộ thay vì có thể chạy, và chưa hề có được doanh thu từ việc giới thiệu nó ra thế giới, Tippett chỉ cho phép mình có những giấc mơ ngắn hạn.
Tham khảo Arstechnica
NỔI BẬT TRANG CHỦ
-

Laptop 8GB RAM sắp tràn ngập thị trường do cấu hình RAM cao ngày càng đắt đỏ
Tình trạng thiếu hụt bộ nhớ DRAM đang buộc các hãng sản xuất laptop phải thay đổi chiến lược, khiến những mẫu máy chỉ trang bị 8GB RAM có nguy cơ trở thành lựa chọn phổ biến trong thời gian tới.
-

Bỏ gần 8 triệu mua máy làm sữa hạt này, lúc đầu xót ví nhưng càng dùng càng thấy hợp lý
