Nhìn lại thế giới robot suốt 3 thập kỉ qua
Cùng nhìn lại những bước tiến của ngành công nghiệp robot từ thưở sơ khai.
Hôm thứ ba vừa rồi, thế giới lại thêm một lần nhớ tới cụm từ “Skynet” khi DARPA cho ra mắt thêm một mẫu robot Atlas với hình dạng người hết sức “hầm hố”. Với chiều cao 1,8m và 28 khớp thủy lực, đây tiếp tục là một bước tiến dài trong ngành công nghiệp chế tạo robot. Nhưng phần vẻ ngoài hầm hố này mới chỉ là bước khởi đầu. Cốt lõi của dự án nằm trong hệ thống trí tuệ nhân tạo và thần kinh điều khiển mà DARPA đang phát triển bằng cách tổ chức một cuộc thi phát triển cho 26 nhóm nghiên cứu từ khắp nơi trên thế giới. Sản phẩm của các nhóm này sẽ được DARPA sử dụng làm nền tảng để tiến xa hơn trong việc xây dựng cho mẫu robot này một “bộ não” đủ thông minh để hỗ trợ con người trong mọi lĩnh vực đời sống.
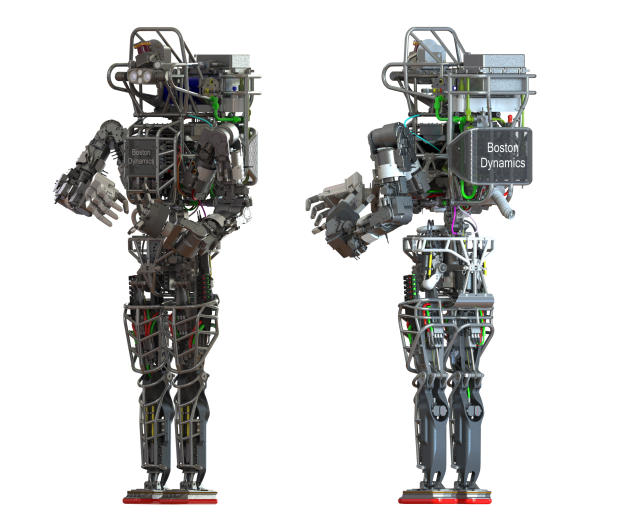
Tuy tạm thời chúng ta có thể yên tâm rằng con đường tạo ra một “Kẻ Hủy Diệt” hoàn thiện như trên phim ảnh vẫn còn rất xa vời. Nhưng sự thật là các công nghệ về cảm biến, cơ khí, mô phỏng cơ bắp, cơ chế điều khiển .v.v.v đang tiến bộ rất nhanh từng ngày, đem các mẫu robot mới càng lúc càng tiến gần hơn tới con người. Hãy cùng GenK nhìn lại 30 năm phát triển của ngày công nghiệp đầy tiềm năng này.
Cơ cao su nhân tạo 1967
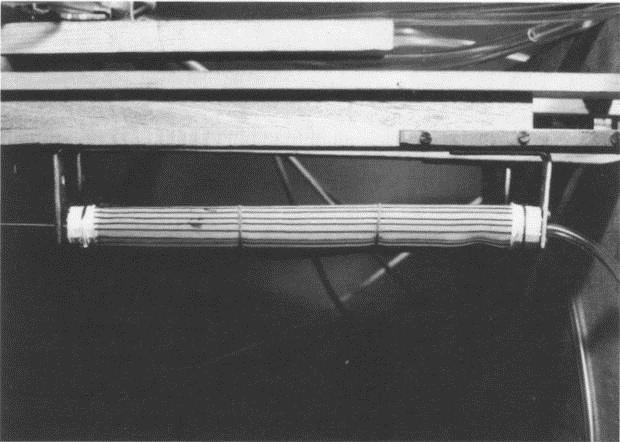
Năm 1967, các mẫu cơ nhân tạo đầu tiên đã được tiến sĩ Ichiro Kato và các cộng sự phát triển tại Đại Học Waseda – Nhật bản, đặt nền móng cho sự phát triển của ngành công nghiệp robot sau này. Sau một thời gian thử nghiệm, nhóm cuối cùng đã khiến các sợi cao su sắp xếp đang xen theo chiều dọc sinh ra được hiệu ứng tương tự như các bó cơ thật.
WL-3, 1968
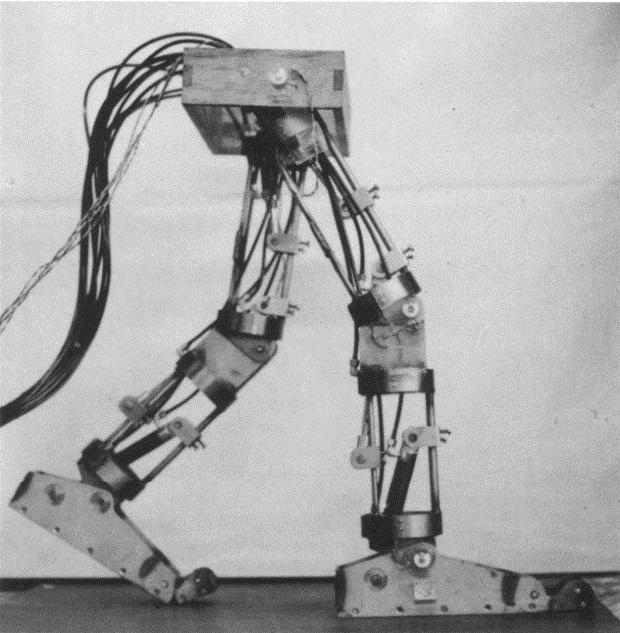
Sau quá trình nghiên cứu cơ chế hoạt động của phần thân dưới cơ thế, nhóm nghiên cứu của đại học Waseda tiếp tục chế tạo thành công cỗ máy với khả năng bước đi đầu tiên. Do giới hạn của công nghệ thời đó, bộ điều khiển và phần cơ khí được tách riêng, nhưng robot mang tên WL-3 cũng đã thành công trong việc tái hiện các chuyển động cơ bản của thân dưới như bước đi, ngồi xuống và đứng dậy.
Cải tiến cơ cao su nhân tạo, 1969
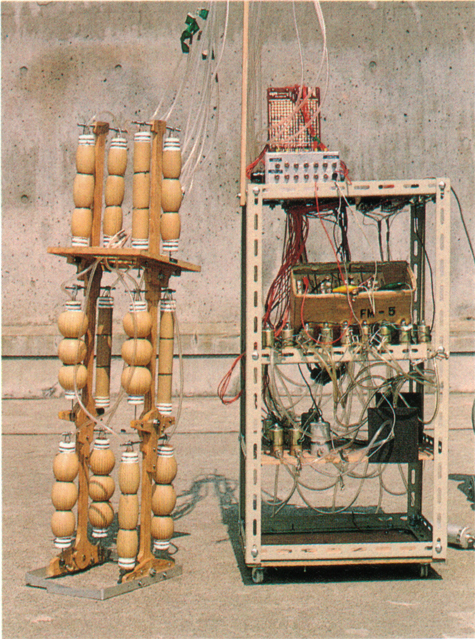
Hệ thống máy kích hoạt bằng khí nén mang tên WAP-1 ra đời năm 1969 tiếp tục kết hợp các thành tựu trước đó. Cũng sử dụng các sợi cơ nhân tạo bằng cao su, WAP-1 đồng thời mang khả năng chuyển động trên 2 trục (một cách hạn chế), tương ứng với chuyển động bước đi trên 2 chân.
WL-5, 1970
Không chấp nhận dừng lại với các thành công trước đó, các thành viên đại học Waseda tiếp tục phát triển robot WL-5 với khả năng bước khi linh hoạt hơn, đặc biệt tiến bộ hơn người tiền nhiệm ở khả năng chuyển hướng. Dĩ nhiên, với các hạn chế của công nghệ thời bấy giờ, bù lại WL-5 chỉ có khả năng bước đi ở tốc độ siêu rùa: mỗi bước tốn trung bình 45 giây.
Wabot-1, 1973
Wabot-1 là mẫu robot đầu tiên mô phỏng toàn bộ hình dáng con người được chế tạo. Bắt đầu được tích hợp các cảm biến, Wabot-1 bao gồm một hệ điều khiển các chi phục vụ chuyển động, một hệ phân tích hình ảnh và một số thiết bị liên lạc. Cảm biến hình ảnh cho phép Wabot-1 ước lượng khoảng cách và phương hướng tới vật thế. Mẫu robot này thậm chí có thể cầm nắm các vật thể bằng cách sử dụng các cảm biến xúc giác.
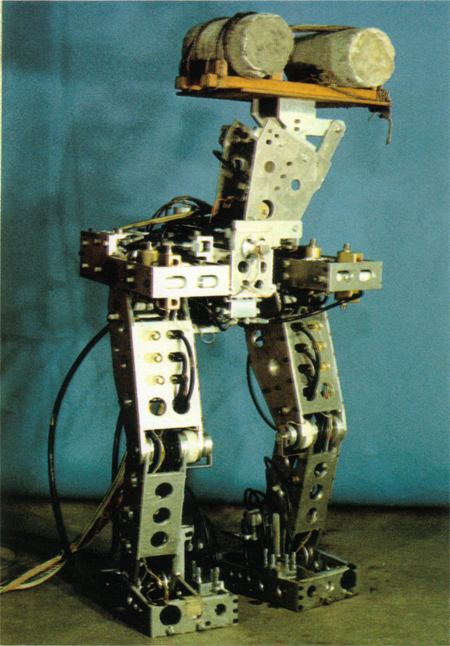
WL-10RD, 1984
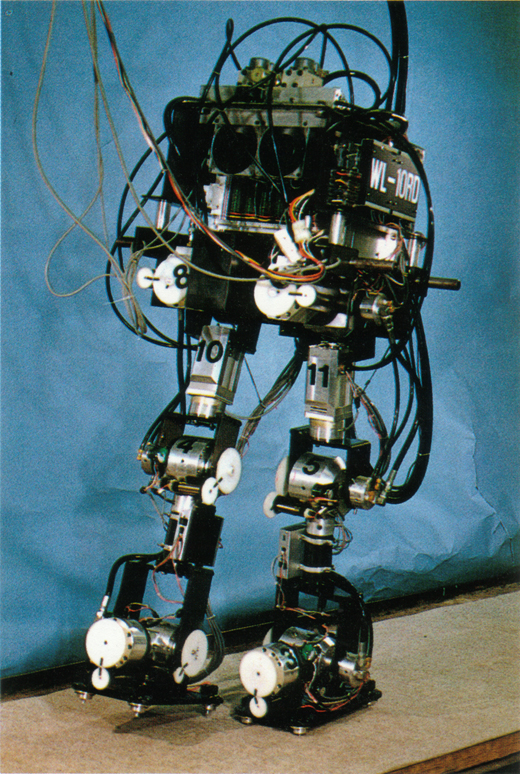
Tới mẫu robot WL-10RD, đại học Waseda đã thành công trong việc tích hợp cơ cấu mắt cá chân và khớp hông. Tận dụng phản hồi từ cảm biến tại các vị trí này, đây là mẫu robot đầu tiên có khả năng tự dịch chuyển trọng tâm giữa 2 chân để chuyển động một cách linh hoạt hơn. Kết quả là tốc độ bước đi “kỉ lục” cho các robot thời bấy giờ: 1.3 giây/ bước.
Shadow, 1987

Năm 1987, Richard Greenhill sáng lập tập đoàn Shadow, chuyên về sản xuất robot và phát triển các công nghệ liên quan đến xây dựng robot. Hãng này đã góp nhiều công sức trong việc xây dựng các mẫu robot với khả năng hỗ trợ con người trong các hoạt động đơn giản thường ngày.
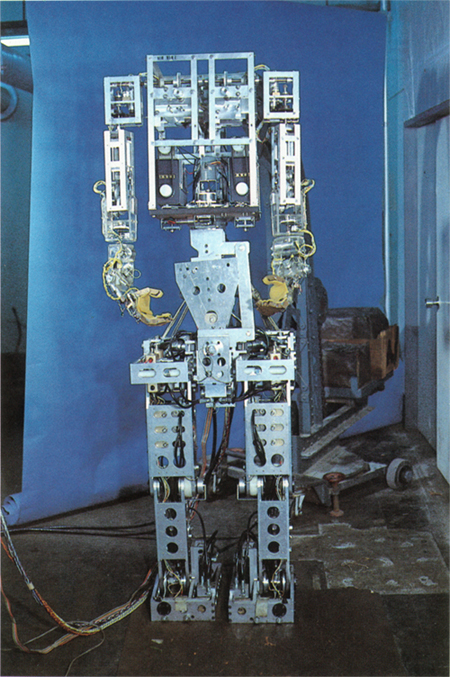
Manny, 1989

Trước các bước tiến của thế giới, quân đội Mĩ cũng quyết định không đứng ngoài cuộc chơi và đã xây dựng thành công robot Manny 1989. Đây là mẫu robot mô phỏng tốt nhất hình dáng con người tại thời điểm bấy giờ, nhưng đáng tiếc vẫn chưa có hệ thống trí tuệ nhân tạo hay cơ chế chuyển động tự động
P2, 1996
20/12/1996, tập đoàn Honda đã khuấy động Tokyo với sự xuất hiện của robot P2. Cao 1.8m và nặng hơn 200kg, Đây là một trong những mẫu robot đầu tiên được giải phóng khỏi hệ thống dây điều khiển và năng lượng phức tạp, nhờ hoạt động bằng pin.
H5, 1998
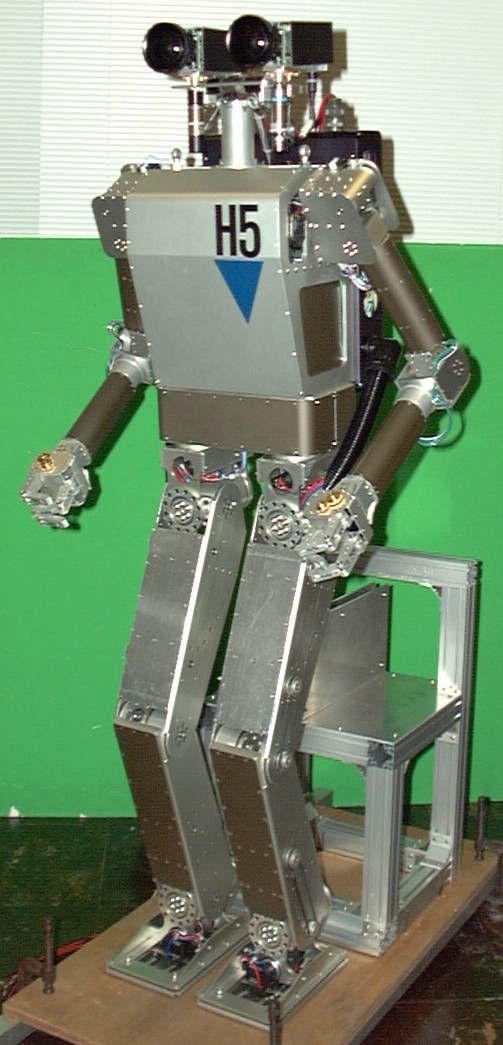
Năm 1998, tiếp tục đến lượt đại học Tokyo cho ra mắt sản phẩm thử nghiệm H5, với kích thước tương đường P2.
REEM-A, 2005

REEM-A, sản phẩm với khả năng đi lại, thao tác bằng tay, nói chuyện và phân tích hình ảnh được hoàn thiện vào năm 2005. Ngay sau đó vào 2006, REEM-A giành thắng lợi tại cuộc thi RoboCup tổ chức tại Bremen trong phần thi đi lại. Trong phần thi sút penalty, REEM-A cũng giành được vị trí thứ nhì.
Robothespian, 2005

RoboThespian, được bắt đầu phát triển năm 2005 tại Anh bởi tổ chức Engineered Arts Limited, là sản phẩm tiên phong cho các mẫu robot với khả năng tương tác thân thiện với con người. Với khả năng giao tiếp một cách hạn chế sử dụng nhiều loại ngôn ngữ khác nhau, mẫu robot này hiện vẫn liên tục được phát triển và được chào bán với giá khoảng 85000 USD để đặt tại các vị trí hướng dẫn trong khu mua sắm, sảnh đường.v.v.
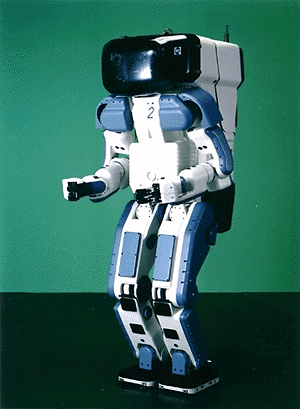
HRP-3 Promet, 2007

Các mẫu robot HRP-3 Promet Mk-II, HRP-2 Promet, and HRP-3 Prototype lần đầu được giới thiệu tại khu thí nghiệm của tập đoàn Kawada trong một buổi họp bào năm 2007. Với chiều cao 1,6m và trọng lượng 68kg, đây là sản phẩm hợp tác của tập đoàn Kawada với Học viện khoa học và công nghệ cao của Nhật.
Dexter, 2007

Hãng Anybots của Mĩ vào 2007 cũng cho ra mắt 2 mẫu robot dạng người mang tên Dexter và Monty. Dexter cao 1,72m và nặng chỉ hơn 60kg mang trong mình khả năng đi lại, nhảy và tự động cân bằng chuyển động cơ thể gần giống với một con người. Để làm được điều này, Anybots sử dụng hệ thống các cảm biến trên thân Dexter, liên tục đo đạc và điều chỉnh các “cơ” – vốn là các xy-lanh khí – nhằm đạt mức cân bằng tốt nhất.
Aero-Blue, 2008

Tiếp tục tại cuộc thi “nội trợ” của robot tổ chức tại quận Kanagawa – Tokyo năm 2008, hình ảnh của Aero-Blue đang gập chiếc áo phông từ giỏ quần áo giặt là minh chứng rõ ràng nhất rằng các thế hệ robot mới đang tiến ngày càng gần hơn tới khả năng thực hiện các tác vụ thường ngày thay cho con người.
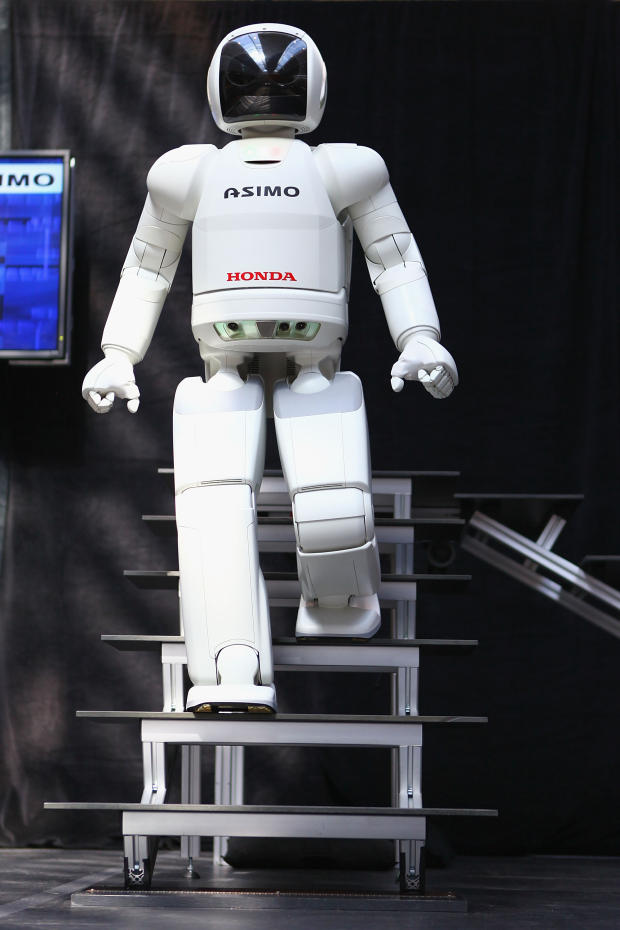
Năm 2011 , Honda tiếp tục thu hút được sự chú ý của toàn thế giới khi giới thiệu chú robot mà sau này danh tiếng được rất nhiều người biết tới – Asimo – ngay trên đất Mĩ.
Trí tuệ vật lí

Với các tiến bộ vượt bậc trong công nghệ điều khiến và cảm biến, các mẫu robot hiện đại ngày nay phần lớn đều đã có khả năng di chuyển qua nhiều loại địa hình và sử dụng một số công cụ cơ bản vốn được thiết kế cho con người
Vậy tiếp theo là gì? Dĩ nhiên là hệ thống trí tuệ tân tiến, và đó chính xác là điều DARPA đang nhắm đến. Hồi đầu năm nay, trên tạp chí Quốc Phòng của Mĩ, tiến sĩ James K. Gimzewski của đại học California cho biết bằng với các nỗ lực tái tạo cấu trúc tổ chức của bộ não hiện nay, chúng ta sẽ sớm được chứng kiến một bước đột phá trong ngành công nghiệp robot nói chung và hệ thần kinh nhân tạo nói riêng. Được biết thêm, Gimzeski hiện là cộng sự của DARPA trong một sự án mang tên Trí Tuệ Vật Lý (Physical Intelligence). Ông cho biết “Về cơ bản, cơ chế xử lí dữ liệu mà chúng tôi đang phát triển này sẽ hoàn toàn khác với cơ chế chuyển dữ liệu từ bộ nhớ vào vi xử lí trên các máy tính hiện nay”.
Tham khảo: Cnet
NỔI BẬT TRANG CHỦ
-

Thời đại smartphone giá rẻ kết thúc: Khi ngàn đô không còn là đỉnh - mức "bình thường mới" đã ngang ngửa chiếc iPhone đầu tiên
Giá smartphone không chỉ tăng, mà đang bước vào một mặt bằng hoàn toàn khác. Mức "bình thường mới” của thị trường giờ là những con số mà trước đây từng bị xem là xa xỉ.
-

Sản lượng phim ngắn người đóng tại Trung Quốc giảm 50%, hàng nghìn diễn viên mất việc sau một mùa Tết vì AI
